|
Каталог
|
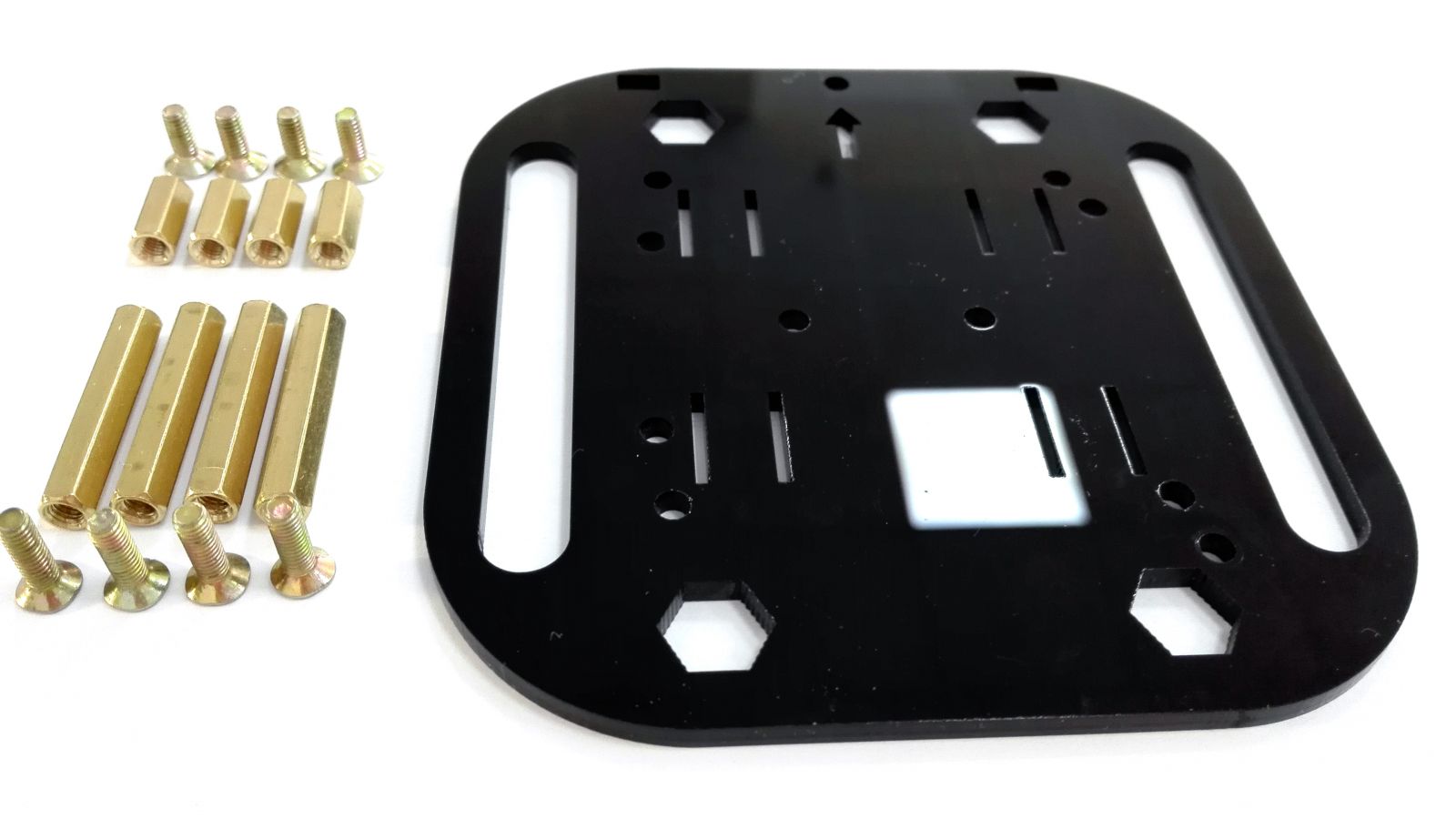
Сборка танцующего робота2019-04-11 Всі статті →Сборка любого конструктора интересный и увлекательный процесс не только для детей но и для взрослых. Процесс увлекательный если есть подробное руководство или процесс сборки интуитивно понятен. Если же нет ни того ни другого то процесс сборки может закончиться не начавшись. Именно поэтому и была написана данная статья - инструкция по сборке Танцующего робота. Процесс сборки максимально подробно описан и иллюстрирован. И, если Вы решитесь на сборку этого робота, поверьте - Вы ни минуты не пожалеете, а его танец никого не оставит равнодушным) 1. Первым делом необходимо убедиться в наличии всех компонентов для сборки робота. Если отсутствующий винтик или гаечку можно в процессе найти в закромах, то отсутствующий элемент каркаса робота сделает его окончательную сборку затруднительной а то и вовсе невозможной. Следующим шагом будет снятие защитной пленки с пластиковых элементов. Для этого необходимо аккуратно поддеть ногтем край пленки и потянуть ее вдоль элемента. Пользоваться для этого металлическими инструментами не рекомендуется так как можно поцарапать поверхность. 2. Собираем верхнюю палубу. На палубе вырезана стрелочка, указывающая направление вперед.
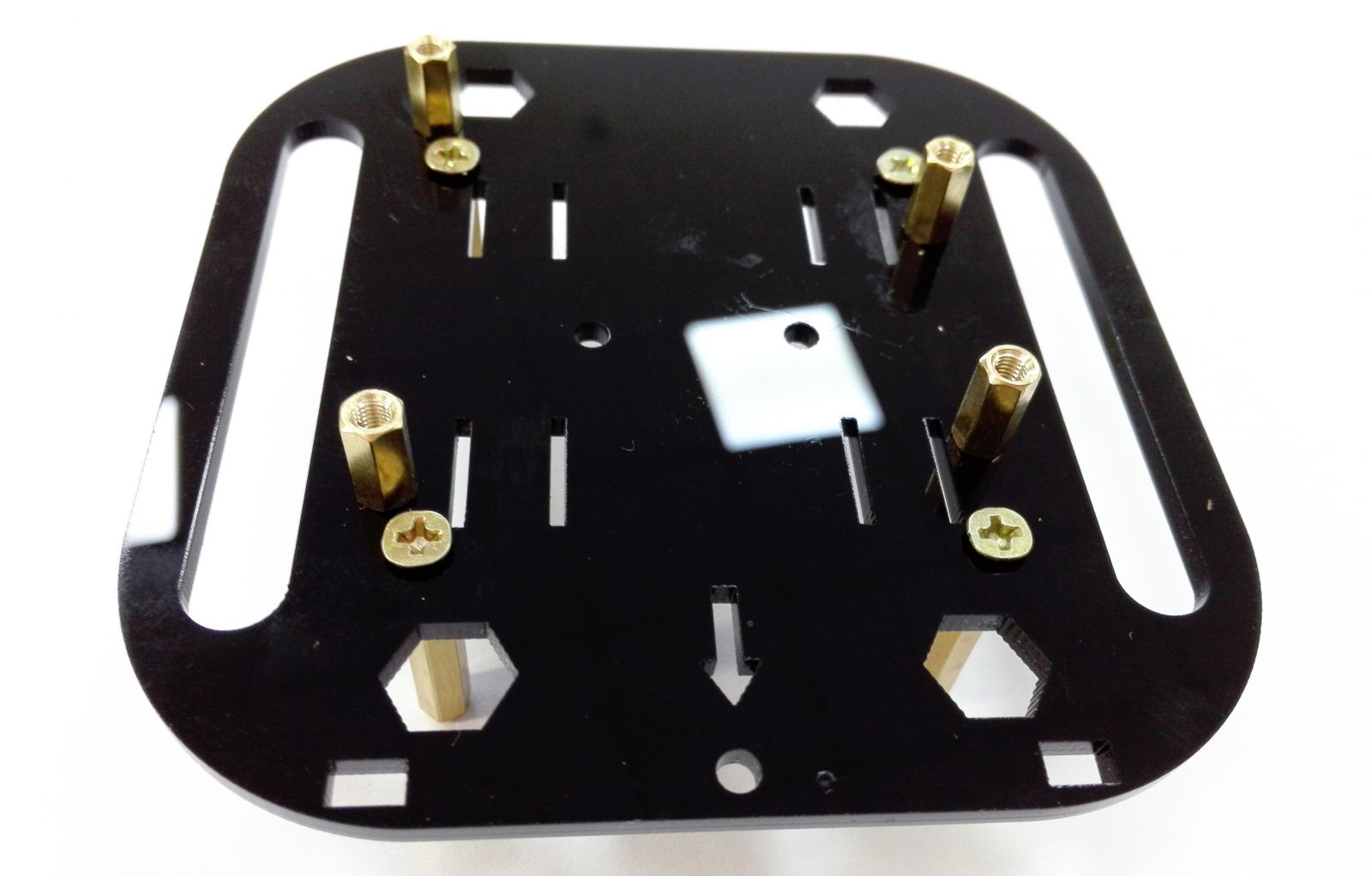
Прикручиваем 4 латунных стойки длиной 25мм 4-мя винтами М3х10. С другой стороны прикручиваем 4 латунных стойки длиной 10мм 4-мя винтами М3х8. В результате должно получится такое размещение стоек на палубе:
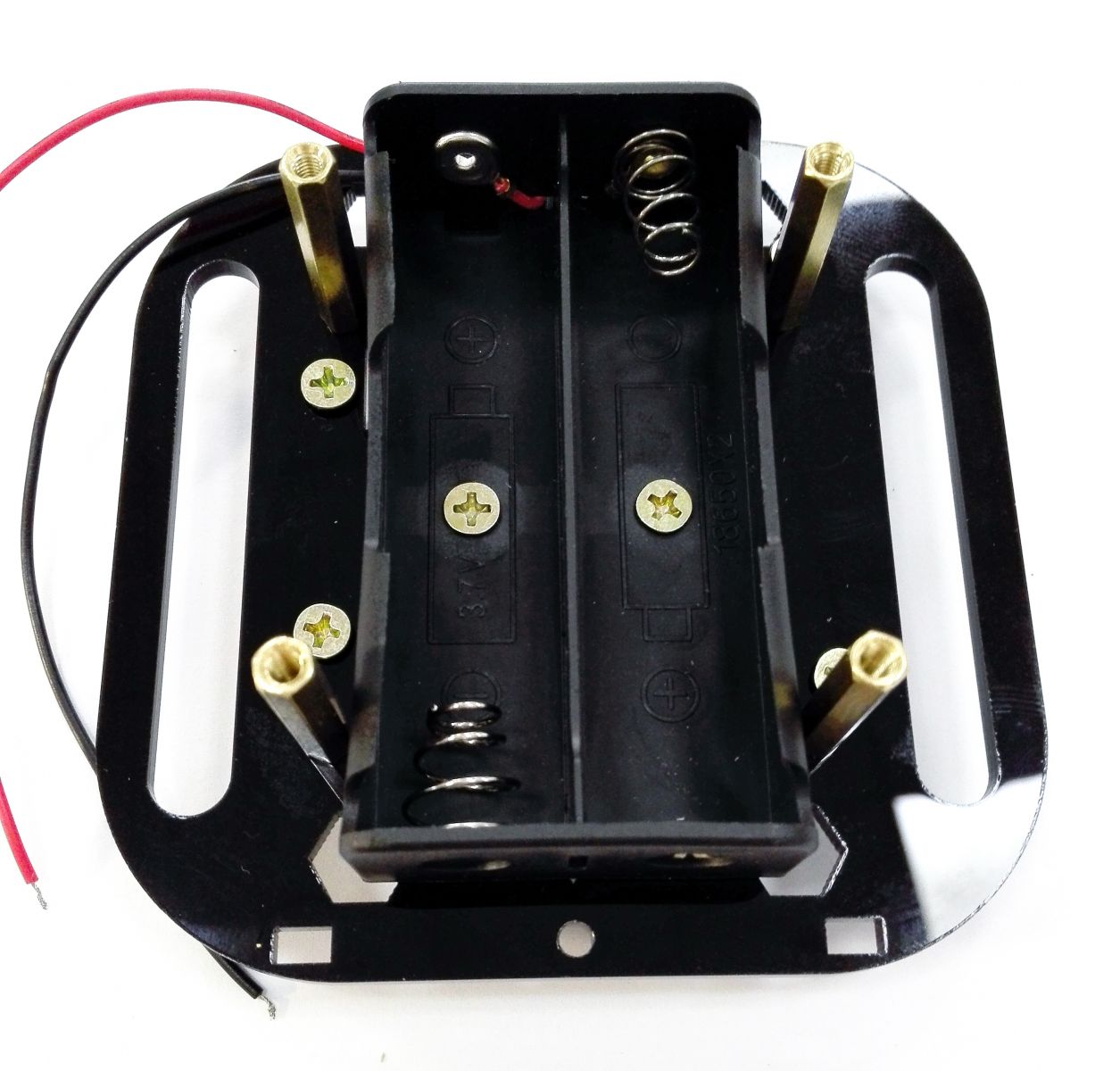
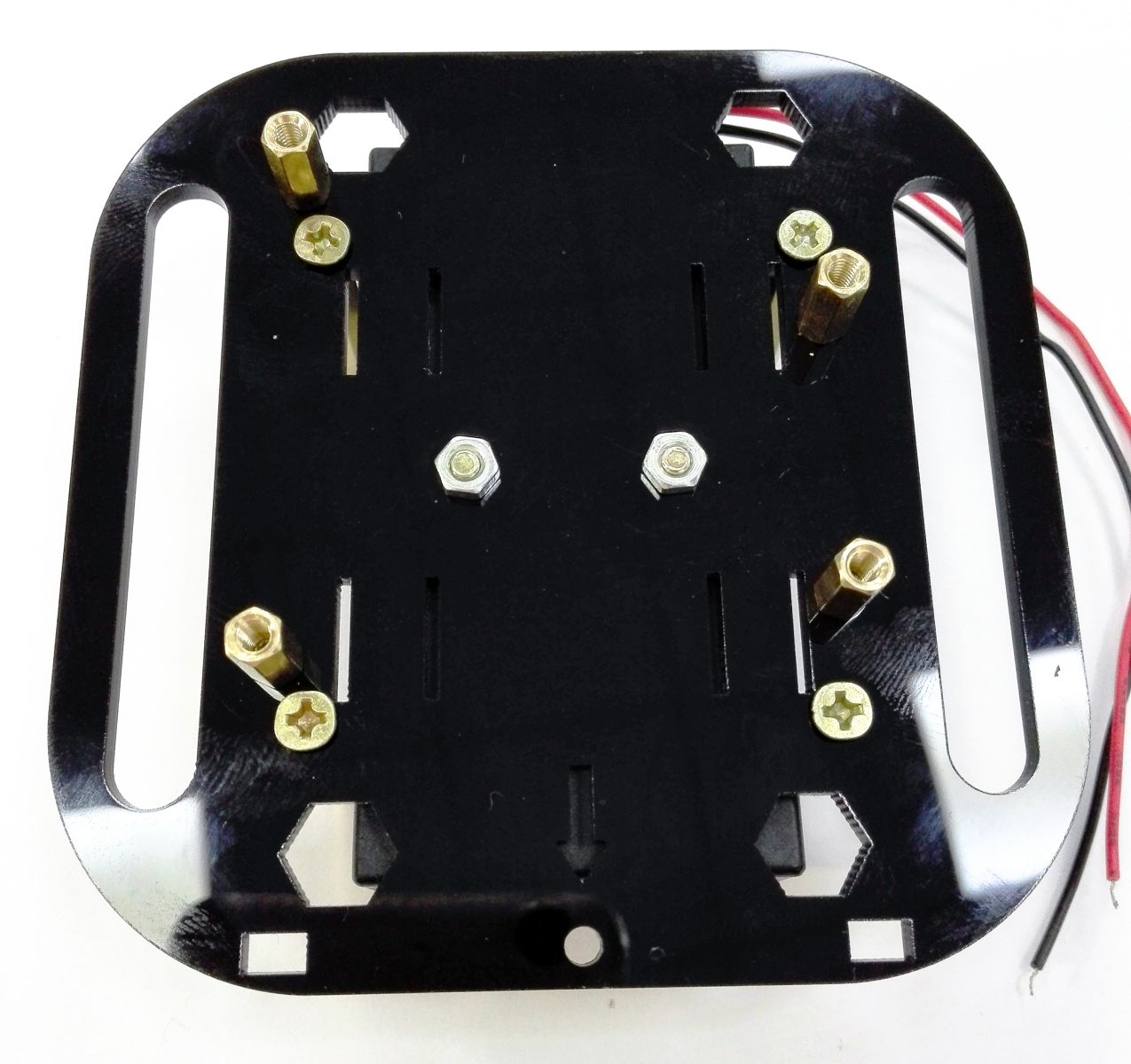
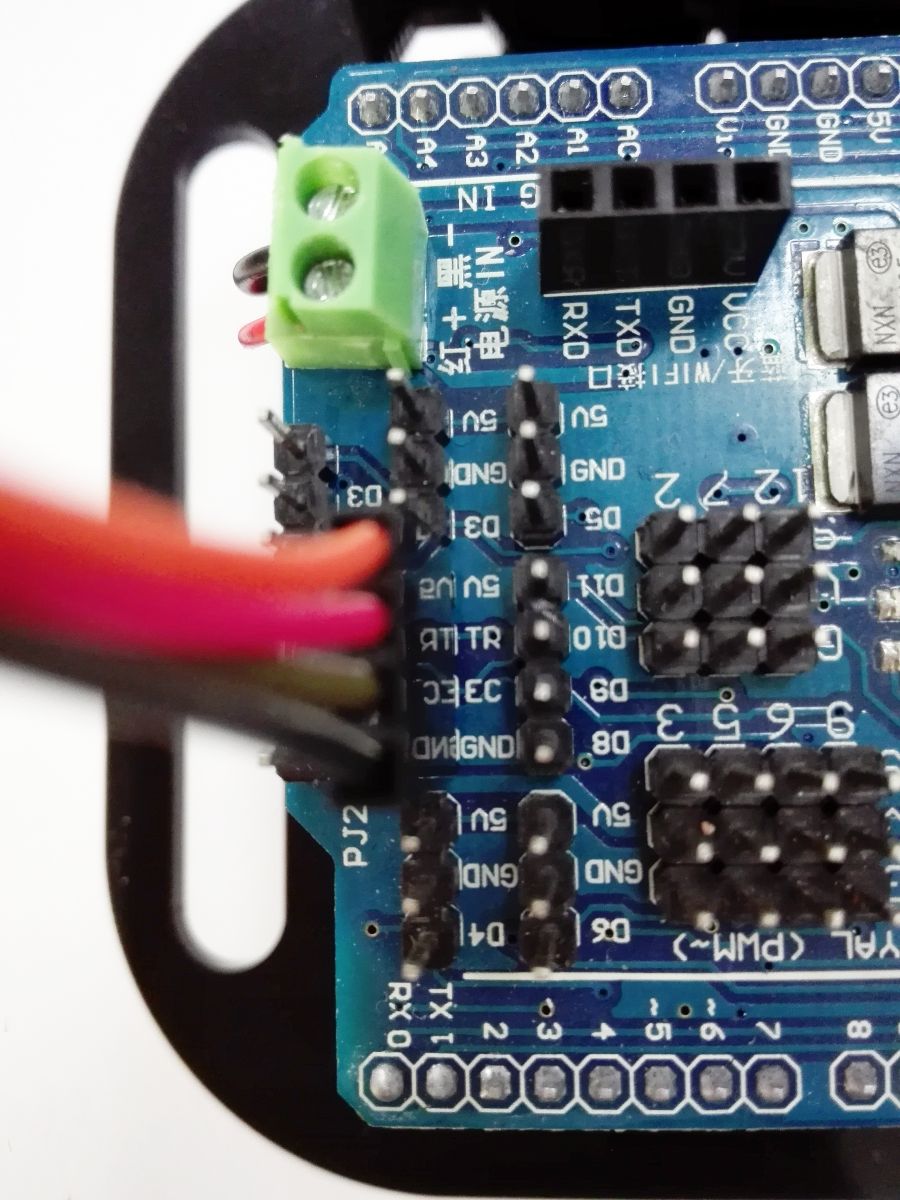
Двумя винтами М3х8 и гайками М3 прикручиваем батарейный отсек со стороны длинных стоек. Батарейный отсек должен быть установлен таким образом, что бы его провода выходили со стороны, противоположной стрелке, указывающей направление вперед.
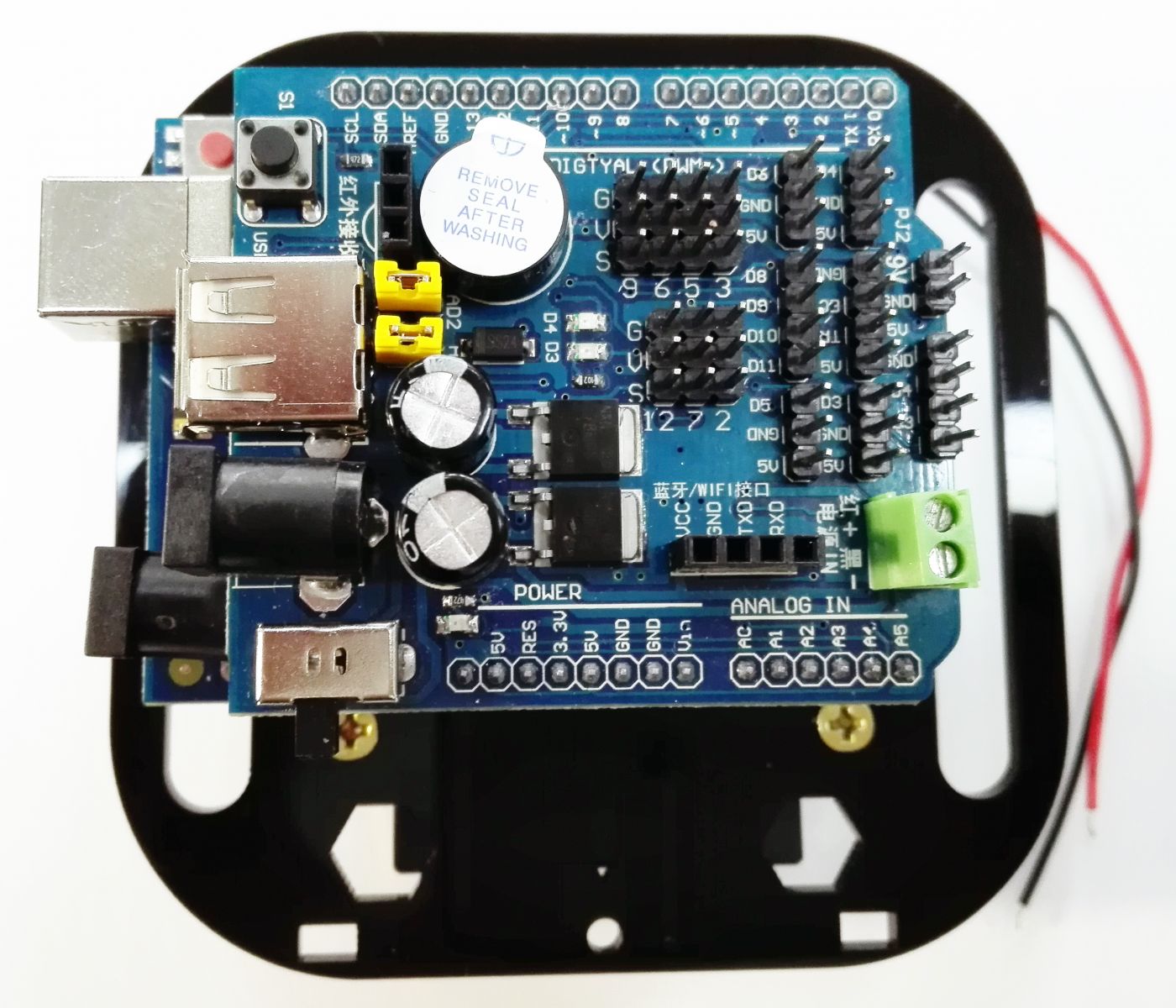
При прикручивании вначале необходимо вкрутить винты в отсек а затем прикрутить его гайками к палубе. Сильно затягивать винты не следует — пластик достаточно хрупкий и при сильной затяжке может треснуть. Далее крепим контроллер к коротким стойкам 3-мя винтами М3х8. При установке контроллера обратите внимание на правильность установки контроллера. На картинке видно, что один винт не закручен. Как правило трех винтов более чем достаточно. Если закрутить четвертый то он своей шляпкой будет упираться в разъём и при закручивании может повредить его.
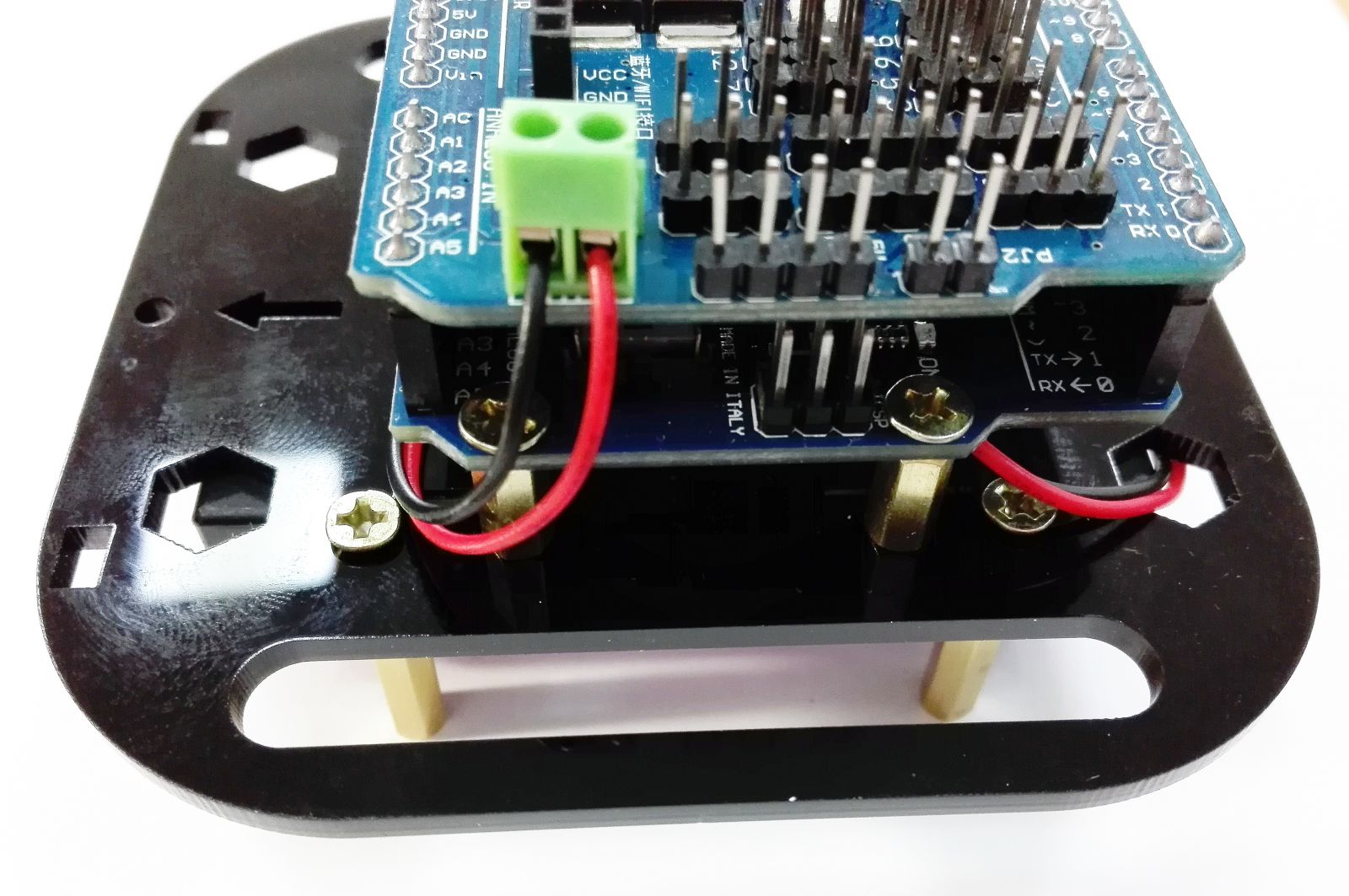
Теперь можно установить на контроллер шилд расширения и прикрутить провода от батарейного отсека.
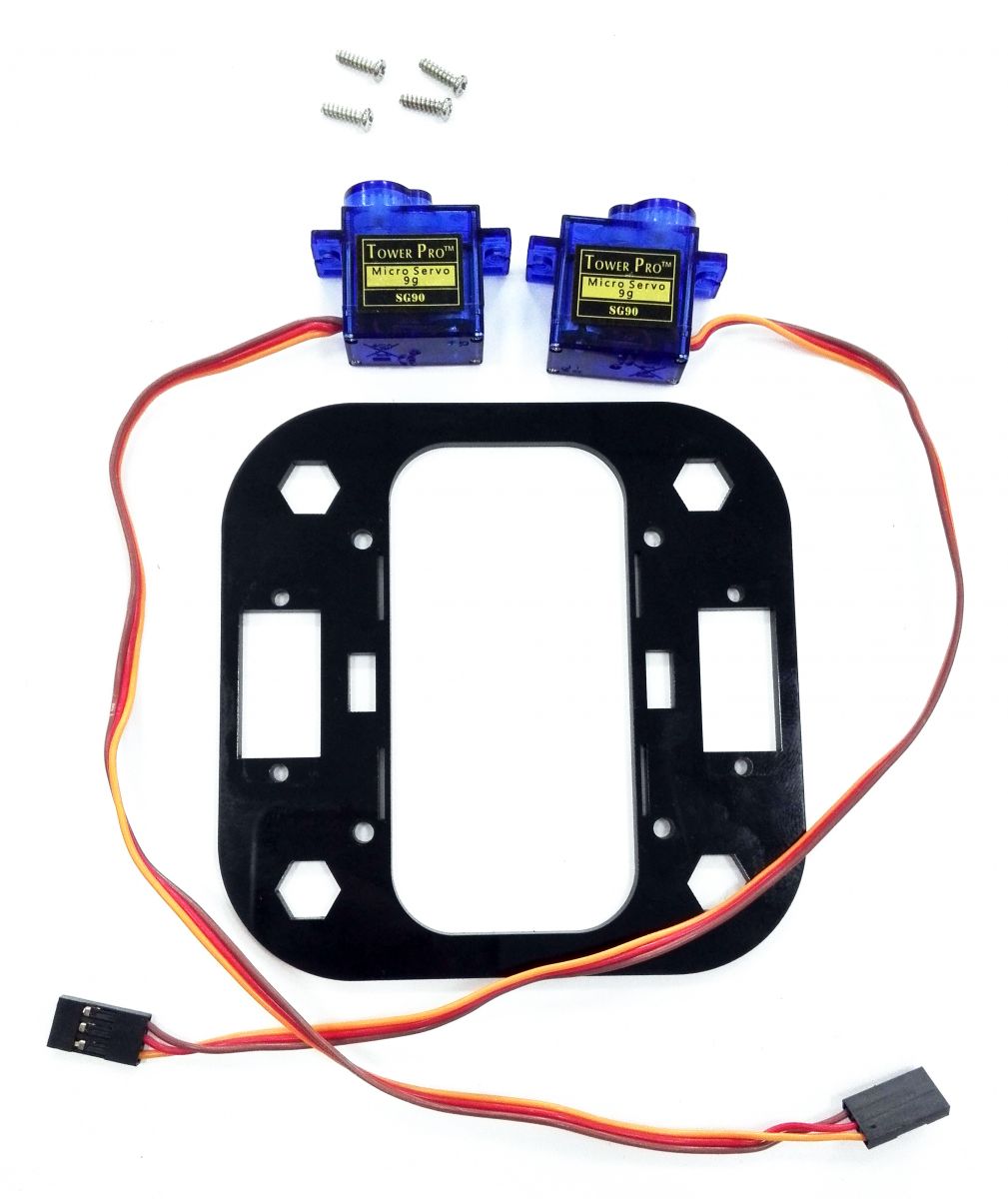
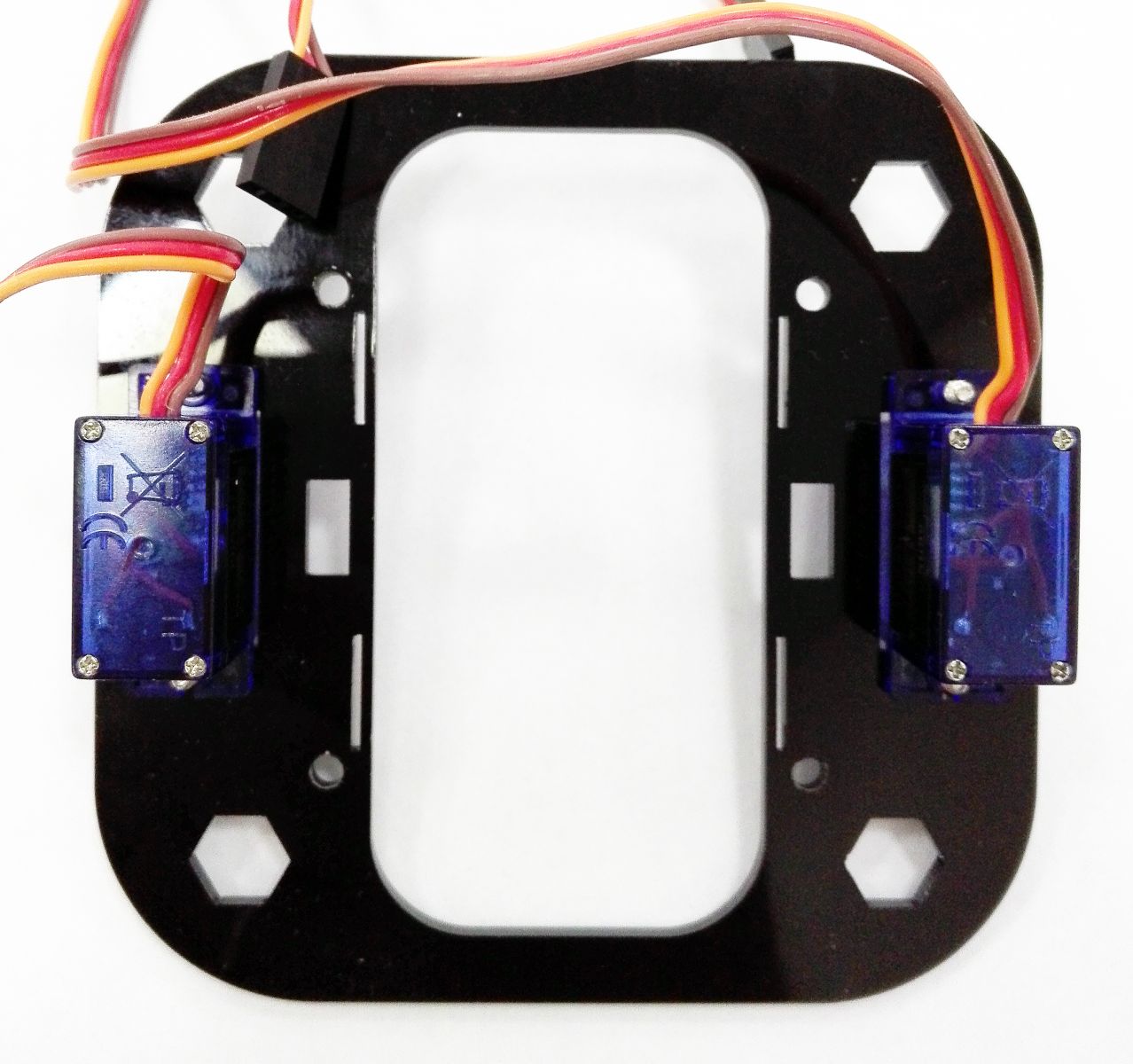
3. Собираем нижнюю палубу. Для сборки нам потребуются 4 винта М3х8, 4 шурупа М2,3х9 и два сервопривода.
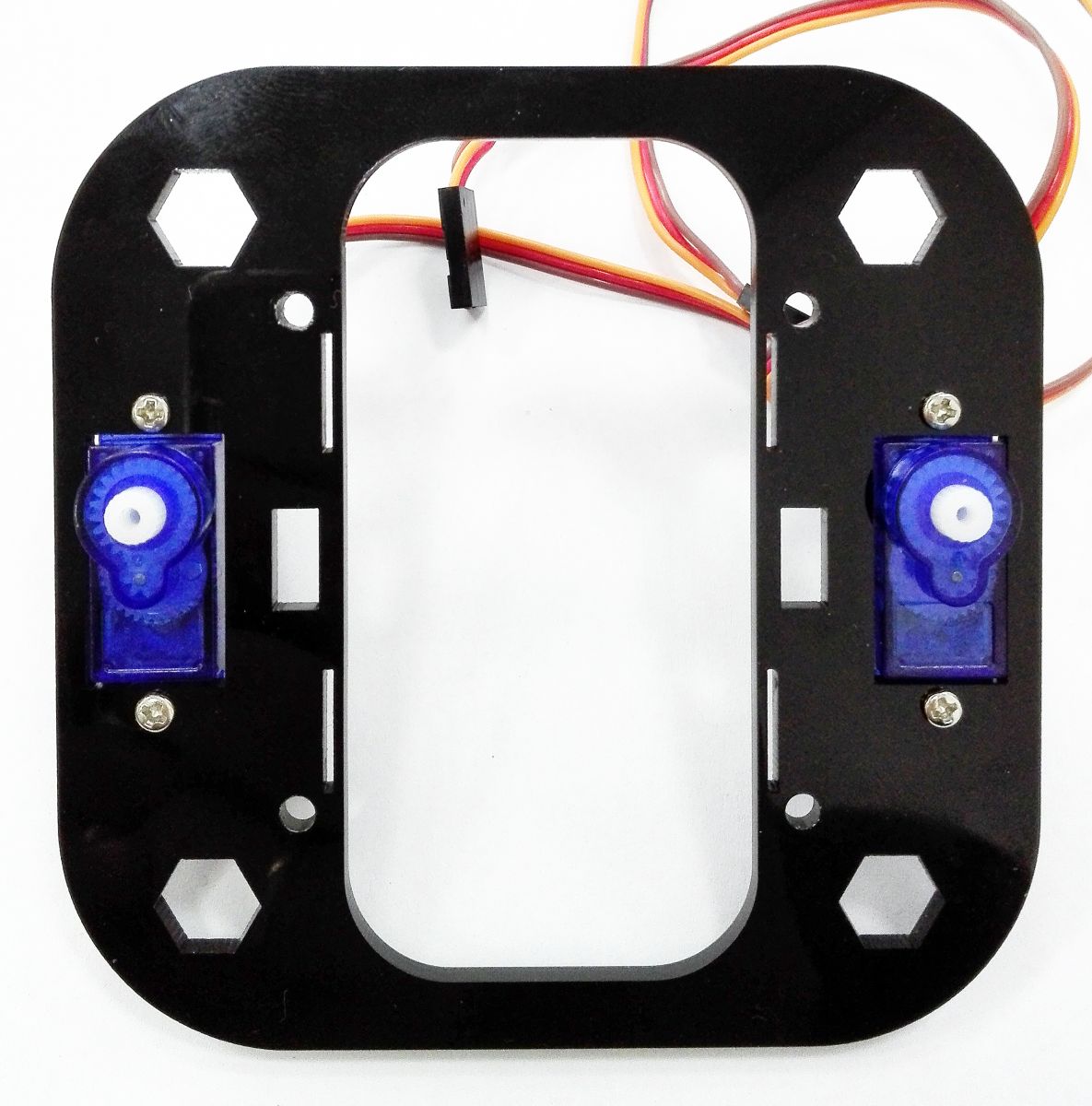
Шурупами прикручиваем сервоприводы к палубе. Затяжка шурупов не должна быть сильной — можно повредить корпус привода, но и не слабой — при работе робота соединение не должно разбалтываться. Винтами прикручиваем нижнюю палубу к верхней.
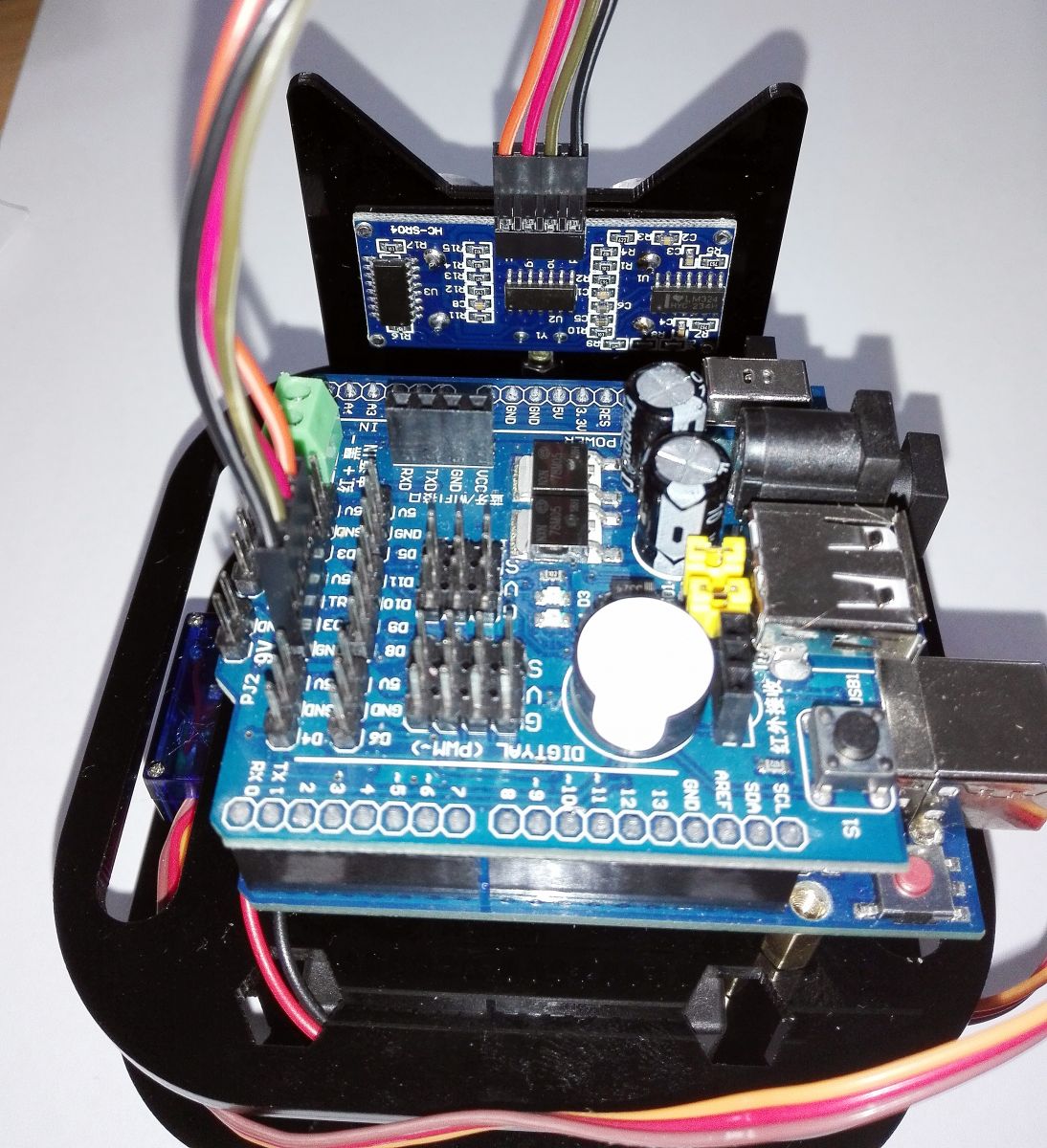
4. Собираем ультразвуковой датчик расстояния. Для его сборки потребуются панель датчика, 4 шурупа М2х6, ультразвуковой датчик расстояния, винт М3х10, гайка М3 и четырехпроводный кабель.
Прикручиваем датчик к панели четырьмя шурупами выводами вверх, вначале наживив все четыре шурупа, после чего , прикручиваем панель к верхней палубе винтом М3х12 и гайкой М3 и подключаем кабель к датчику и к шилду. При подключении кабеля необходимо убедиться что черный провод подключен к выводу GND датчика.
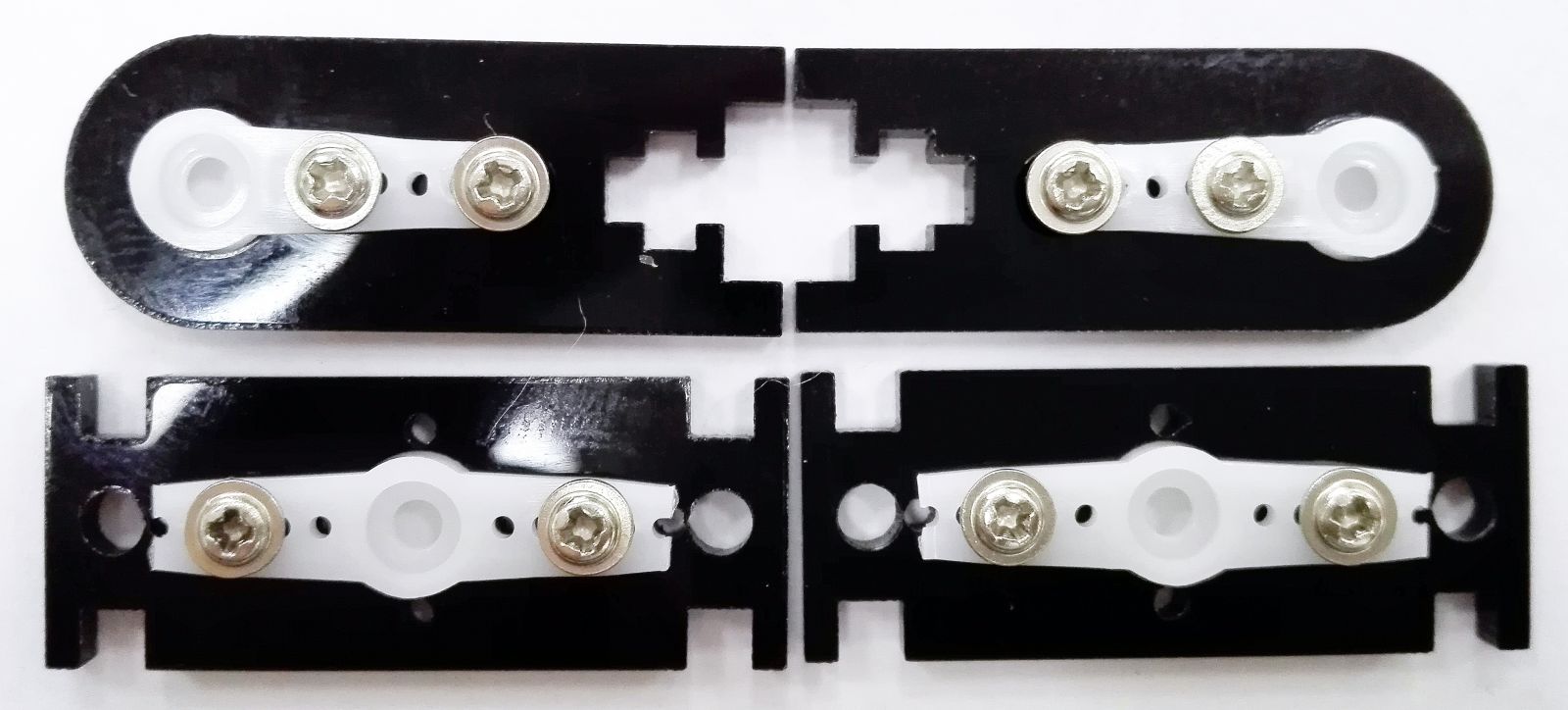
5. Собираем ноги робота. Для этого потребуются детали, изображенные на фотографии:
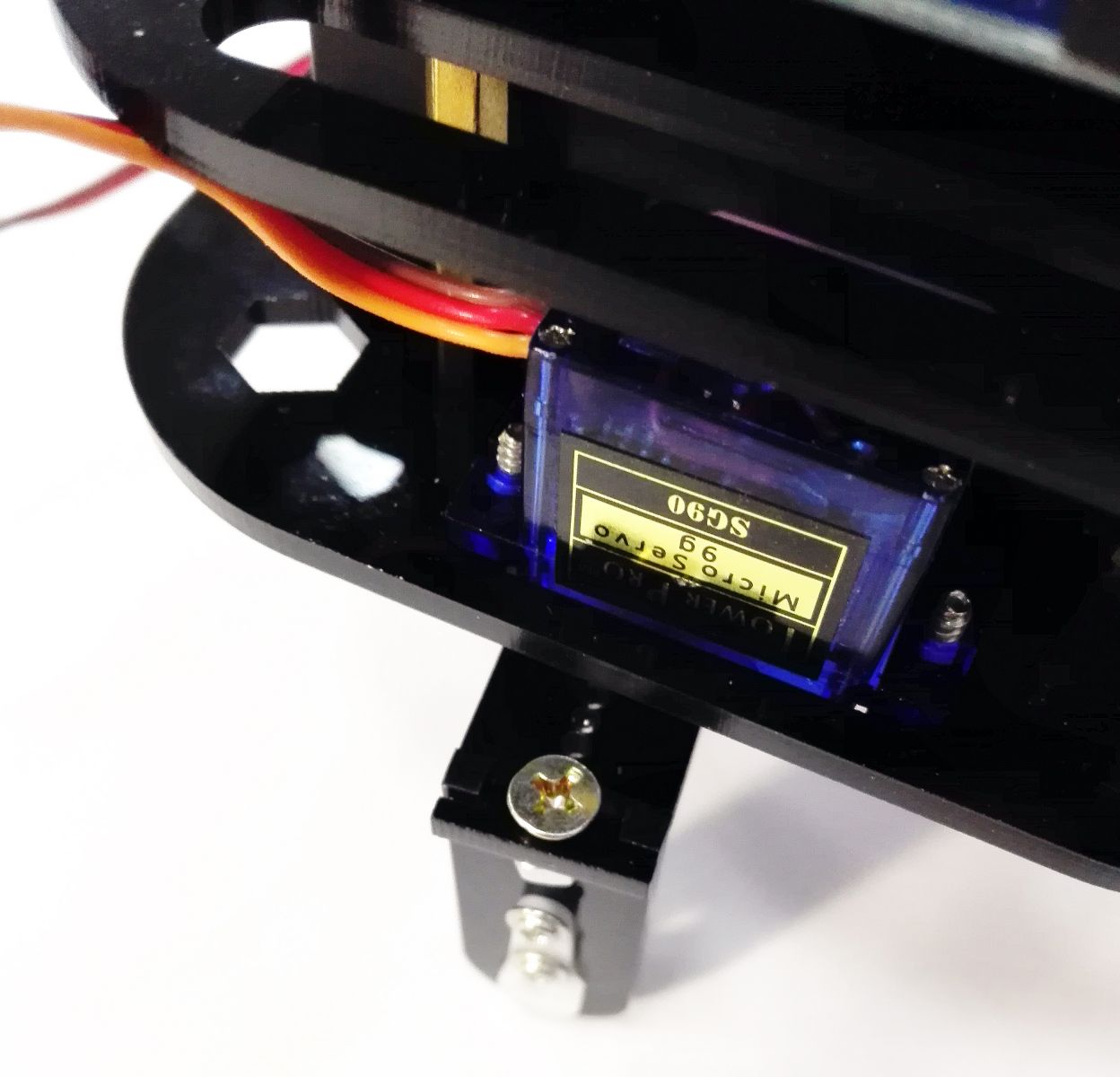
Вначале собираем крепление сервопривода. Их прикручиваем винтами М3х10 и гайками М3. При установке креплений в основания ног нужно быть очень аккуратным и не прикладывать усилий — это неизбежно приведет к поломке креплений. Если такое всё же произошло - деталь можно склеить (Как, например, крепление сервопривода на правой ноге. Крепление треснуло посередине и было склеено цианокриловым клеем. Дале без склеивания деталь, после установки сервопривода, надёжно его фиксировала).
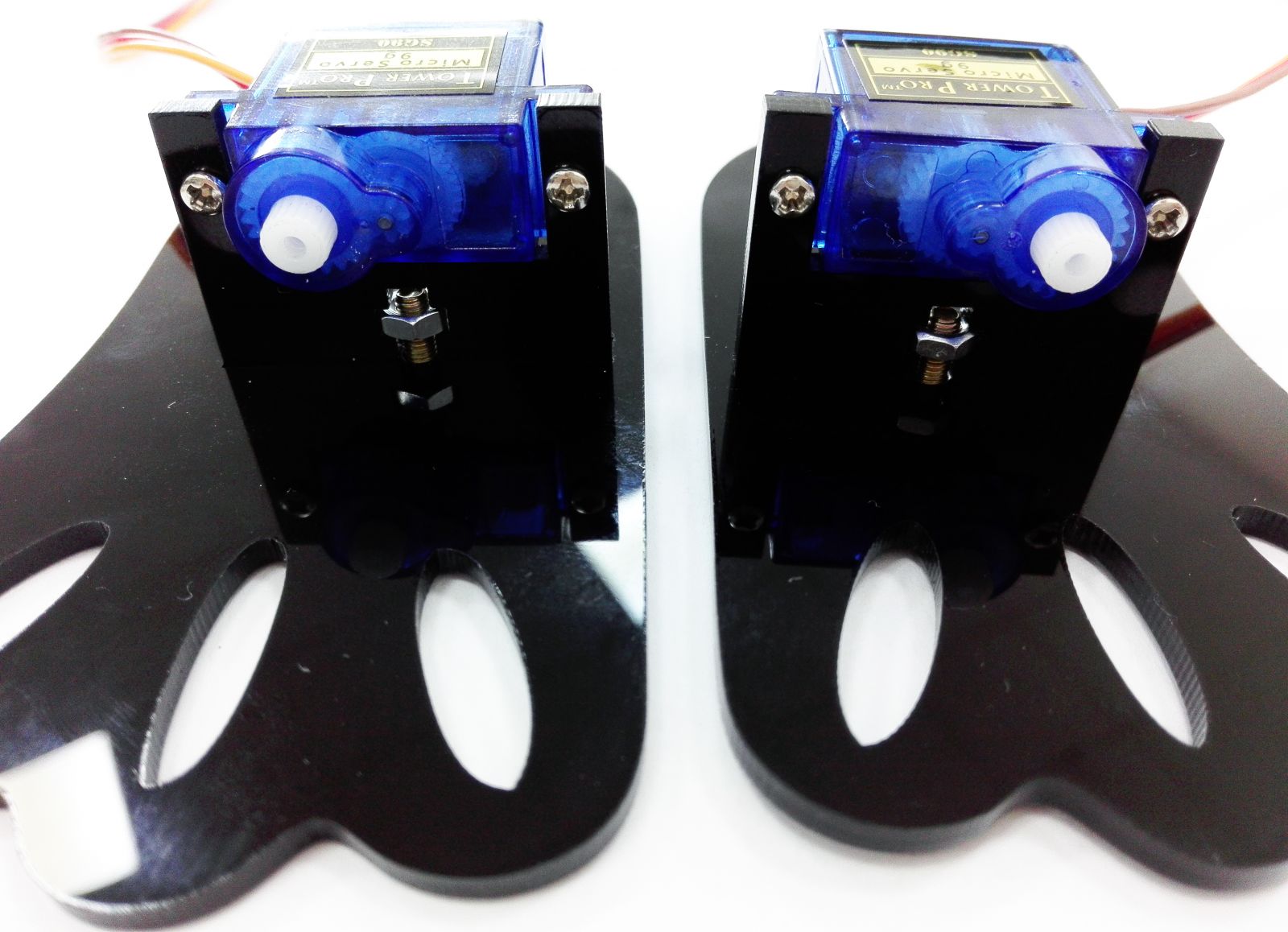
Нужно, аккуратно покачивая крепление, вставить его в пазы основания. Если таким образом установить их не получится — можно воспользоваться напильником или надфилем и подпилить шипы основания. К креплениям прикручиваем сервоприводы. Их нужно установить как показано на фото.
Важно, что бы ось сервопривода проходила по центру ноги. Сервоприводы крепятся двумя шурупами 9х2.3. Далее собираем опору и сустав ноги. Из комплекта сервопривода берем длинную двухстороннюю качалку и обрезаем её края на уровне второго отверстия с краю. Закручиваем шурупы 1,7х5 в третьи отверстия от центра как показано на фотографии ниже. Делать это нужно положив опору на стол, так как шурупы закручиваются неохотно... Из комплектов сервоприводов берем односторонние качалки и закручиваем шурупы 1,7х5 во второе и третье отверстия качалки, считая от центра. В результате должно получиться так:
Теперь собираем компоненты узла воедино. В этом нам помогут винты М3х10 и гайки М3.
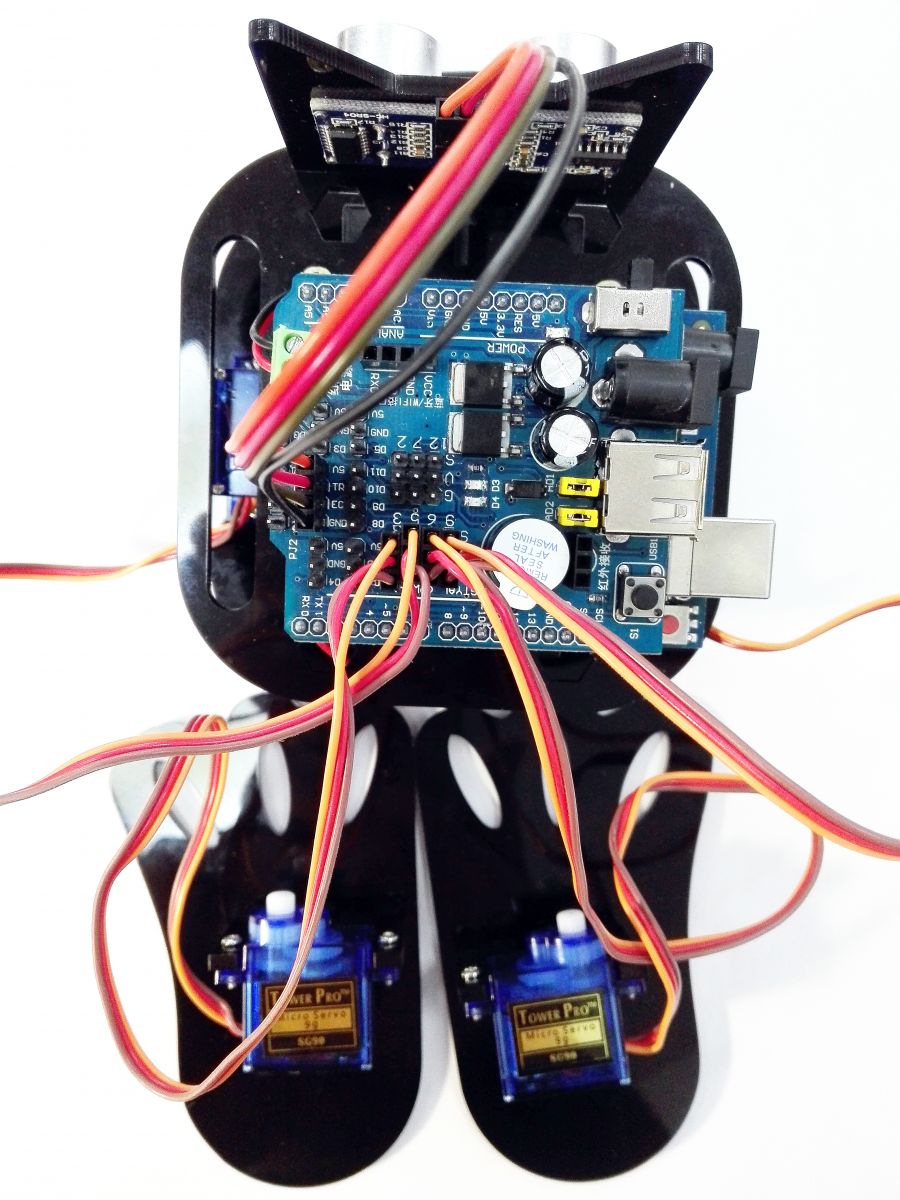
Теперь возвращаемся к ранее собранному шасси робота. Вначале необходимо на компьютер установить среду разработки Arduino IDE. Установка её проста и в особых комментариях не нуждается. Для дальнейшей сборки нам потребуется установить сервоприводы в правильное положение. Для этого предназначена программа simple_robot.ino. Необходимо в тексте программы откорректировать несколько строк: #define INSTALL //#define CALIBRATION //#define RUN Определение имени INSTALL переводит программу в режим, когда сервоприводы устанавливаются в среднее положение. Остальные определения должны быть закомментированы двумя символами // Теперь подключаем к шилду сервоприводы. Для подключения доступны такие номера пинов: 3,5,6 и 9. (сервоприводы можно подключать не ко всем выводам контроллера). Номера используемых выводов нужно прописать в программе: RU.attach(9); // Connect the signal wire of the upper-right servo to pin 9 - Правый верхний сервопривод RL.attach(6); // Connect the signal wire of the lower-right servo to pin 6 - Правый нижний сервопривод LU.attach(5); // Connect the signal wire of the upper-left servo to pin 5 - Левый верхний сервопривод LL.attach(3); // Connect the signal wire of the lower-left servo to pin 3 - Левый нижний сервопривод Подключение будет выглядеть таким образом:
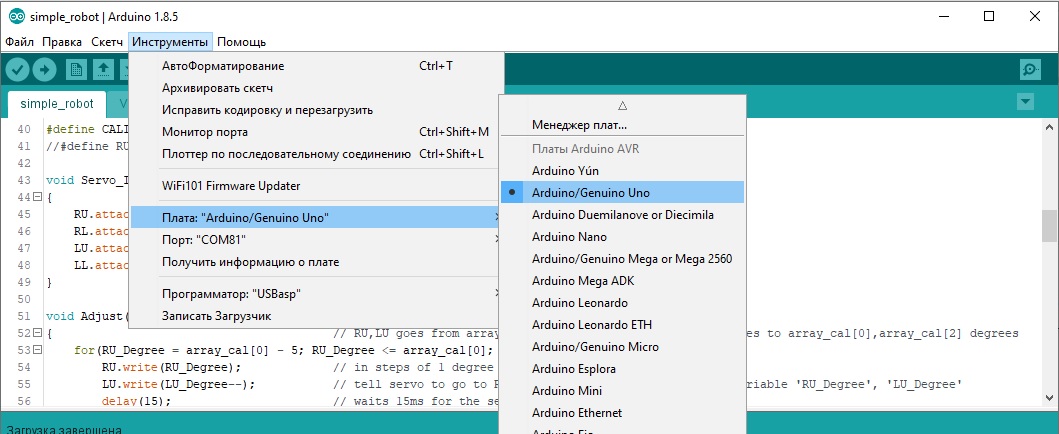
Далее запускаем среду разработки сообщаем какой контроллер мы используем:
Затем выбираем последовательный порт, которым у нас является контроллер (Вы же не забыли его подключить?) )
В данном случае контроллер определяется как порт СОМ81 (у Вас определённо будет другой номер порта) Теперь нажимаем Ctrl+U и если все сделано правильно то программа скомпилируется и загрузится в контроллер. Сразу после загрузки сервоприводы установятся в среднее положение и зафиксируются. Теперь всё готово к продолжению сборки. Собранные суставы необходимо установить на сервоприводы нижней палубы таким образом, что бы они стоял параллельно краю палубы и крепление к нижнему сервоприводу смотрело вперед (в направлении стрелки, что нанесана на верхней палубе). Если полной параллельности добиться не получится то следует установить сустав таким образом, что бы он смотрел слегка наружу. В дальнейшем эту непараллельность можно устранить дополнительной калибровкой в программе. Прикручиваем сустав к валу сервопривода шурупом из комплекта сервопривода. Прикручивать нужно плотно, но без чрезмерного усилия, так как детали капроновые. Далее поворачиваем сустав на валу сервопривода на 90 градусов наружу - что бы крепление нижнего привода было снаружи и ослабляем на пару оборотов винт препления детали сустава. Это нужно для того, что бы деталь можно было немного отогнуть и установкаить нижний сервопривод, после чего винт закручиваем обратно. Перед установкой сервопривода нужно подготовить вторую опору ноги. Для этого понадобятся такие детали:
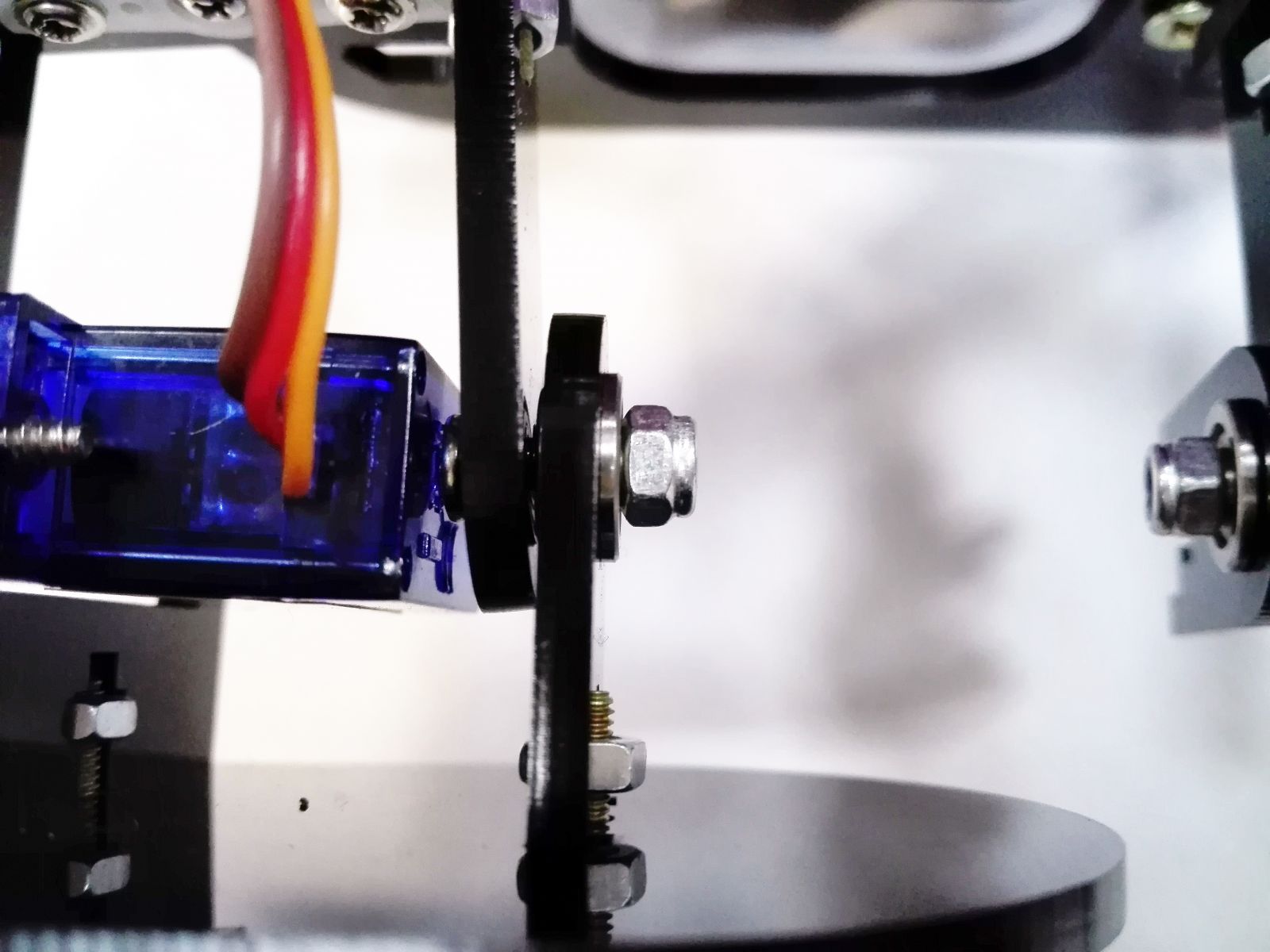
Винт вставляем в отверстие сустава со стороны сервопривода, вставляем подшипник в отверстие второй опоры бортиком наружу, одеваем опору с подшипником на винт и закручиваем гайку. Гайка самоконтрящаяся, поэтому обязательно нужно пользоваться при закручивании гаечным ключём. одеваем в сустав нижний сервопривод ноги и прикручиваем его вал шурупом из набора сервопривода. прикручиваем к стопе ноги вторую опору.
Закручиваем винт сустава, который мы перед установкой ослабляли и приклеиваем резиновые ножки.
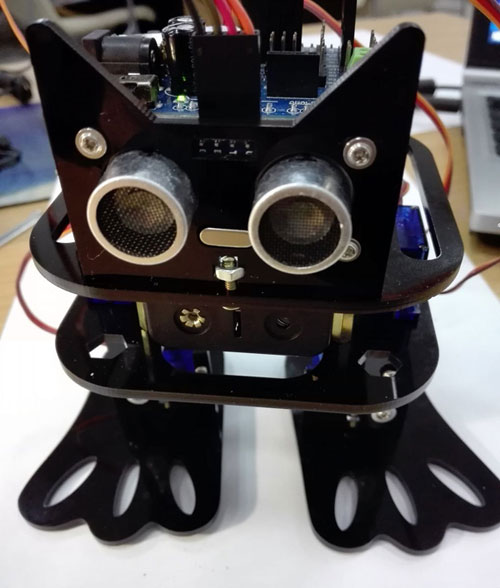
Аккуратно укладываем провода, что бы они не мешали полному вращению сервоприводов. Теперь сборку Танцующего робота можно считать законченной! Можно загрузить скетч Dancing.ino из архива и наслаждаться танцем Вашего творения!) А вот что получается:
Дякуємо Вам за звернення! Ваш відгук з'явиться після модерації адміністратором.
Поки немає відгуків на цю статтю.
|





.jpg)