|
Каталог
|
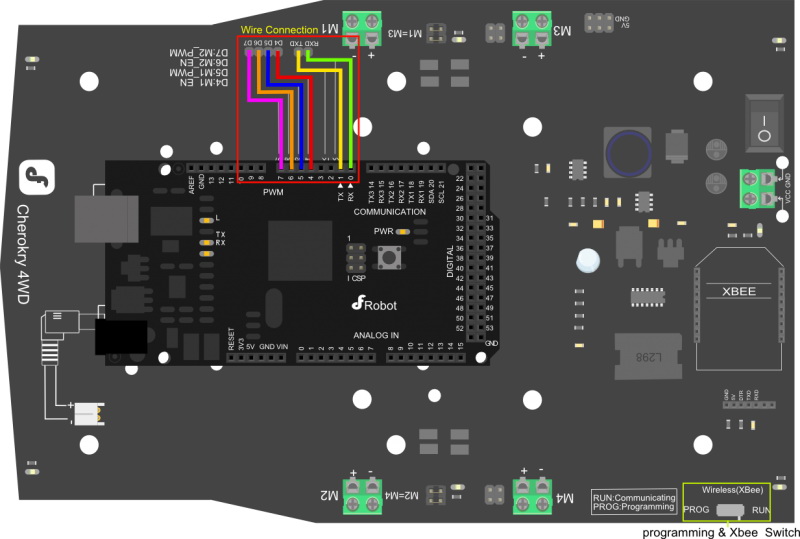
Cherokey 4WD Mobile robot - це універсальний мобільний робот-джип, сумісний з популярними контролерами Arduino UNO, Arduino Mega, Ромео та ін. На відміну від звичайних мобільних платформ, ця поставляється з друкованою платою, на якій вже розташовані драйвери двигунів, роз'єми для підключення бездротового керування та ін. В Cherokey вбудована мікросхема драйвера L298P, яка дозволяє керувати двома 6-12V двигунами постійного струму з максимальним споживаним струмом 2А кожен. Контролер в комплект платформи не входить!
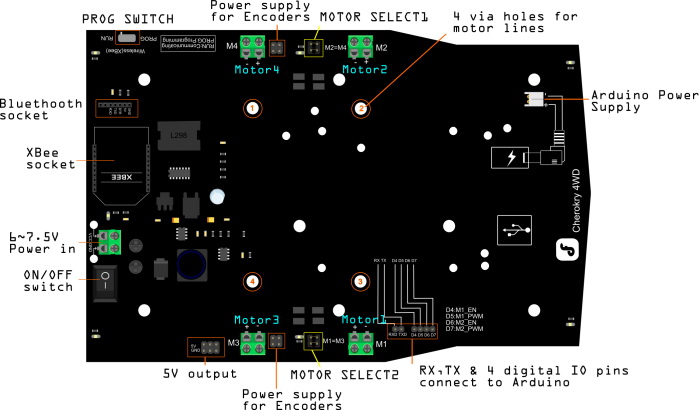
Розпіновка плати:
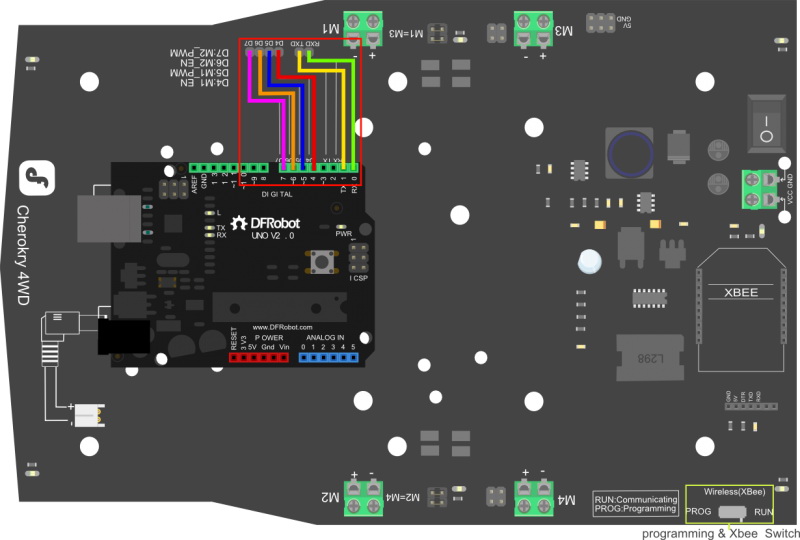
Платформа сумісна з такими контролерами, як Arduino UNO, Diecimila, leonardo ... Mega 1280,2560, ADK ... Romeo, ін. Cherokey 4WD Arduino UNO:
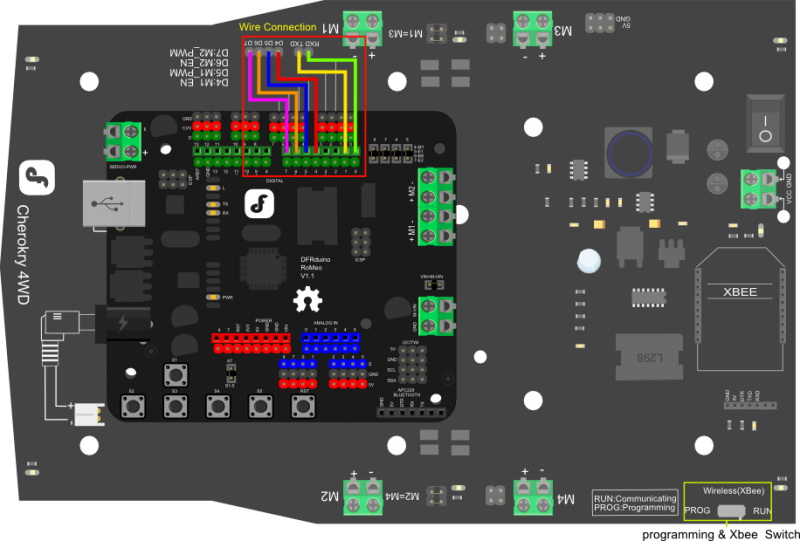
Cherokey 4WD_Romeo:
Cherokey 4WD_Mega:
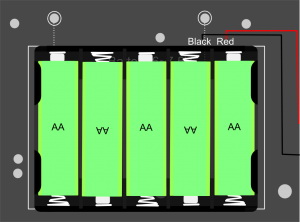
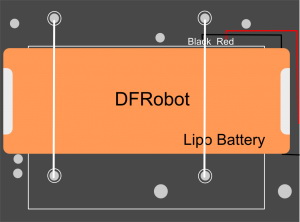
Варіанти підключення живлення:
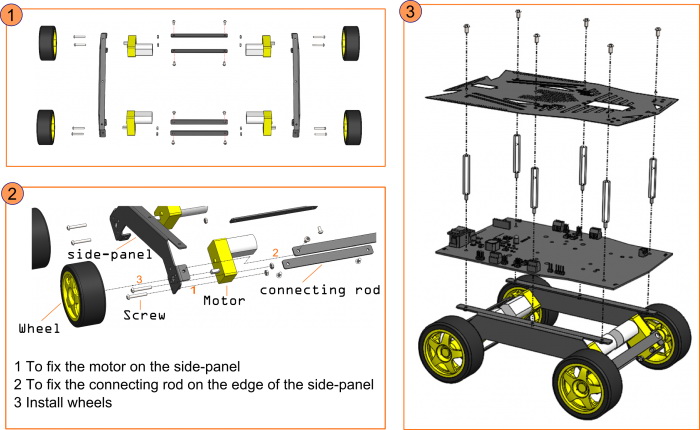
Графічна інструкція по збиранню:
Офіційна Wiki
int E1 = 5; //M1 Speed Control
int E2 = 6; //M2 Speed Control
int M1 = 4; //M1 Direction Control
int M2 = 7; //M1 Direction Control
void stop(void) //Stop
{
digitalWrite(E1,0);
digitalWrite(M1,LOW);
digitalWrite(E2,0);
digitalWrite(M2,LOW);
}
void advance(char a,char b) //Move forward
{
analogWrite (E1,a); //PWM Speed Control
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void back_off (char a,char b) //Move backward
{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void turn_L (char a,char b) //Turn Left
{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void turn_R (char a,char b) //Turn Right
{
analogWrite (E1,a);
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void setup(void)
{
int i;
for(i=4;i<=7;i++)
pinMode(i, OUTPUT);
Serial.begin(19200); //Set Baud Rate
Serial.println("Run keyboard control");
digitalWrite(E1,LOW);
digitalWrite(E2,LOW);
}
void loop(void)
{
if(Serial.available()){
char val = Serial.read();
if(val != -1)
{
switch(val)
{
case 'w'://Move Forward
advance (255,255); //move forward in max speed
break;
case 's'://Move Backward
back_off (255,255); //move back in max speed
break;
case 'a'://Turn Left
turn_L (100,100);
break;
case 'd'://Turn Right
turn_R (100,100);
break;
case 'z':
Serial.println("Hello");
break;
case 'x':
stop();
break;
}
}
else stop();
}
}
|