|
Каталог
|
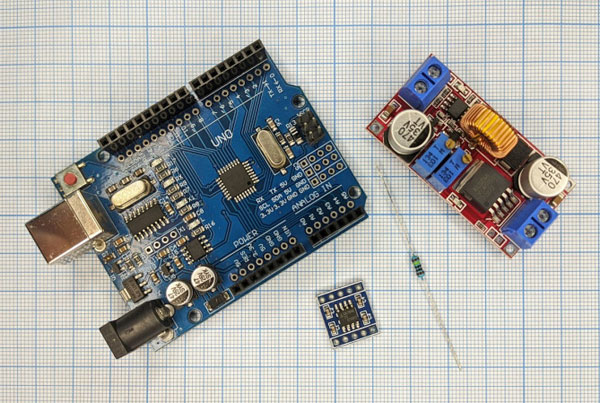
Программное управление диапазоном выходного тока понижающего преобразователя2021-12-23 Всі статті →Доброго времени суток! В данной статье мы рассмотрим бюджетный вариант управления понижающим преобразователем постоянного напряжения для дальнейшего его использования в качестве управляемого источника питания различной нагрузки, в том числе источников света, при работе которых одним из важнейших параметров является коэффициент пульсаций, который напрямую зависит от частоты работы преобразователей. Например, при использовании таких преобразователей в качестве источников питания элементов освещения рабочего стола или даже освещения растений закрытого грунта, именно в таких случаях частота преобразования играет немаловажную роль. Одним из простейших вариантов решения данной задачи является использование подходящего силового транзистора МОП структуры, например IRF540N, или, например, модуля на базе силового транзистора IRF520, возможно даже модуля на двух транзисторах AOD4184. Но, при этом стоит учитывать, что если управлять данными элементами с использованием доступного ШИМ сигнала на распространённых микропроцессорных платформах линейки Arduino, то частота пульсаций будет на уровне частоты самого ШИМ сигнала, а это в среднем от 31.4 кГц, до максимум 62.5 кГц, если она не будет ограничена самими возможностями силового транзистора или модуля в целом, как например в упомянутом выше модуле на двух транзисторах, которая составляет - 20 кГц. К тому же стоит учитывать, что повышение частоты ШИМ сигнала на платформе Arduino в некоторых случаях является не простой задачей, которая может ограничить функционал самой платформы, поскольку повышение частоты ШИМ сигнала на определённых портах препятствует корректной работе функций времени. Другим вариантом является использование достаточно не бюджетных ШИМ контроллеров которые работают на высоких частотах и при этом содержат на своём борту различные интерфейсы управления. В нашем случае для решения поставленной задачи был выбран не самый простой вариант, но достаточно интересный, аппаратная часть которого состоит из следующих компонентов:
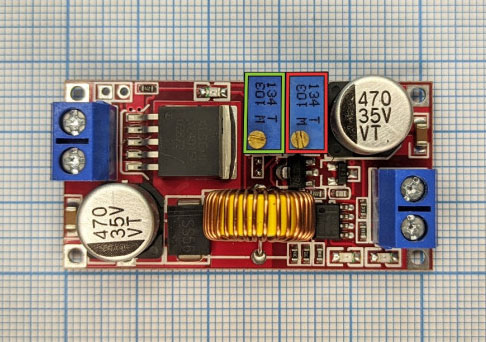
Первым этапом было детально рассмотрено устройство и принцип роботы понижающего преобразователя, построенного на базе микросхемы XL4015. Основные технические характеристики модуля приведены ниже в таблице.
Так же, большим плюсом является то, что модуль имеет защиту от перегрева и короткого замыкания. Но, при этом стоит учитывать, что максимальная мощность модуля достигается только при использовании дополнительного охлаждения. По заявленным характеристикам данный модуль вполне соответствует требованиям для реализации поставленной задачи. Частота преобразования составляет 180 кГц, к тому же модуль имеет достаточной широкий диапазон входного и соответственно выходного напряжения, с возможностью его регулировки, что так же распространяется и на выходной ток. Модуль имеет два подстроечных резистора, которые непосредственно отвечают за регулировку тока и напряжения, номинал каждого резистора составляет 10 кОм.
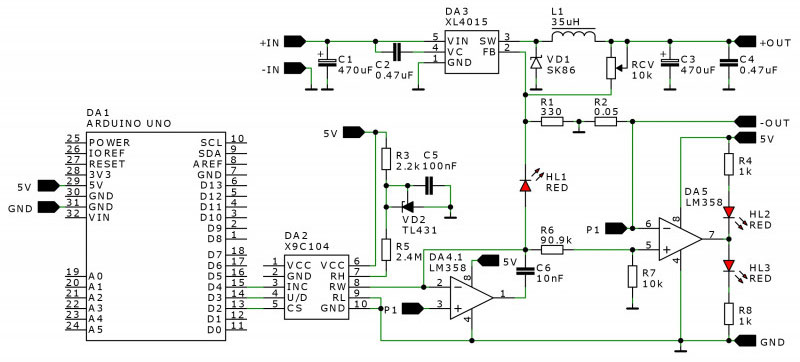
Таким образом, грамотно заменив подстроечный резистор цифровым управляемым потенциометром, можно получить программное управление выходными характеристиками модуля. В случае соблюдения номинала цифрового потенциометра таким же, как и имеющегося на плате подстроечного резистора отвечающего за регулировку тока - задача на половину решается, остаётся только написание алгоритма роботы для микропроцессорной платформы, которая непосредственно осуществляет управление цифровым потенциометром по заданным действиям. Но, к сожалению, у нас в наличии имеется цифровой потенциометр номинал которого составляет 100 кОм, поэтому вместе с потенциометром было заменено и постоянный резистор R5 на номинал 2.4 МОм, для получения необходимого ограничения тока в приделах 2 А при максимальном сопротивлении потенциометра. Кроме неудобства замены потенциометра с таким номиналом в схеме модуля, есть ещё один небольшой минус, который заключается в достаточно большом шаге регулировки ограничения тока, который доходит до 40 мА, поскольку шаг инкремента потенциометра составляет 1 кОм. Расчёт делителя напряжения необходимо производить таким образом, чтобы напряжение, которое поступает на второй вход ОУ, превышало напряжение падения на шунте R2, которое поступает на третий вход ОУ, для соблюдения условия роботы компаратора, именно таким образом работает ограничение тока. Но, это все только в теории, проблемы на этом не закончились, так как цифровой потенциометр имеет очень большую погрешность, на практике это даже больше заявленных производителем 20 %, просадку точки максимального сопротивления под нагрузкой, и при этом еще не линейную характеристику. Так что сопротивление верхнего плеча подбиралось опытным путем и составило 1 МОм. Такое отклонение достигается за счет того, что максимальное сопротивлении цифрового потенциометра составило на удивление 69 кОм, и ко всему напряжение на входе делителя не ровнялось 2.5 В. Конечно, мы попытались исключить возможность неисправности цифрового потенциометра взяв другой, но его сопротивление отличилось не на много - возможно одна партия, но, тем не менее, рекомендуем тщательно проверять роботу делителя, и подбирать сопротивление резистора R5 опытным путем. Общая структурно-принципиальная схема устройства приведена ниже на рисунке.
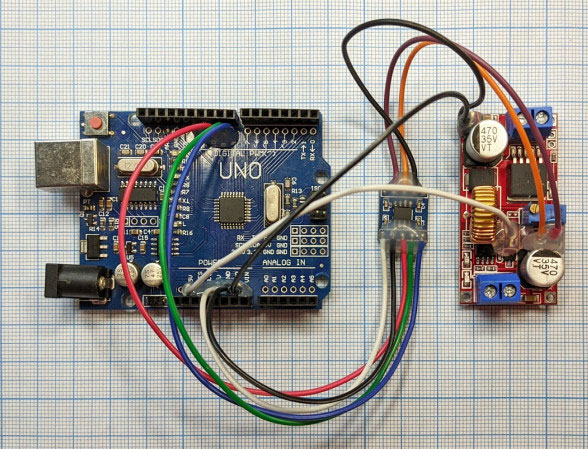
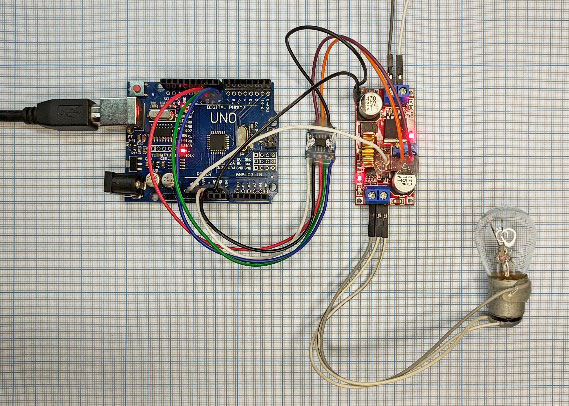
На схеме можно заметить, что модуль лишился стабилизатора напряжения 78L05, предназначенного для питания сдвоенного операционного усилителя LM358 и схемы управления в целом, поскольку при включении модуля от определённых источников питания, схема управления в момент запуска не всегда работала корректно. Питание управляющей схемы осуществляется непосредственно от микропроцессорной платформы. Далее, по приведённой выше схеме было собрано макетный образец, который показано ниже.
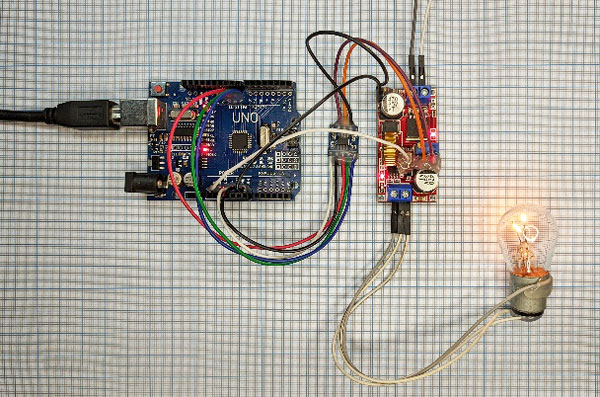
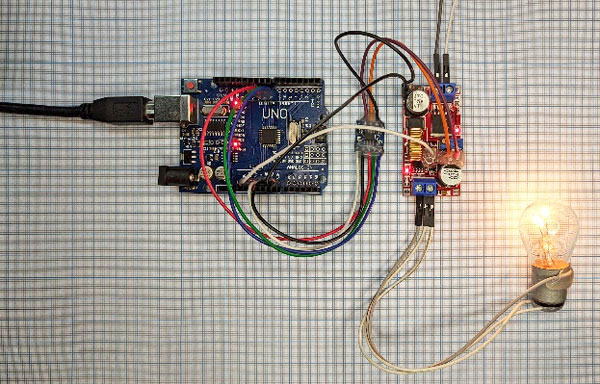
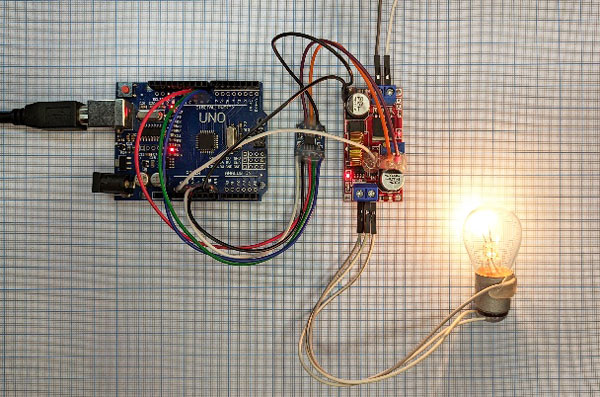
Результат работы макетного образца показано ниже, в качестве нагрузки была использована лампа накаливания.
Программная часть в прикрепленном файле.
Загальна оцінка:
Оцінка
"Программное управление диапазоном выходного тока понижающего преобразователя"
зроблена на основі 3 оцінок 3 клієнтських відгуків. Дякуємо Вам за звернення! Ваш відгук з'явиться після модерації адміністратором.
Євген
02.10.2022 20:07:20

Який мінімальний крок регулювання струмом? Наскільки точним вийшло регулювання за умови великої (зазначені 20%) погрішності Х9С104?
Andrew
28.07.2022 00:56:45
Дуже корисний матеріал, дякую! Також було б круто те саме тільки для цифрового управління напругою
Слоник
26.12.2021 18:25:40
Годная статьяЯ как раз планировал после нг убрать из своего регулируемого БП все обычные потенциометры и заменить их цифровыми. Кстати в теории (пока не проверял на практике) такой же микросхемой Х9С10* можно управлять и напряжением, если подключиться к лапе FB преобразователя XL4015
|
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний