|
Каталог
|
Модуль Pololu AltIMU-10 v5 є інерційним вимірювальним блоком (IMU) і висотоміром, який оснащений тим же гіроскопом і акселерометром LSM6DS33 і магнітометром LIS3MDL, що і MinIMU-9 v5, і додає цифровий барометр LPS25H. Інтерфейс I²C звертається до десяти незалежних параметрів тиску, обертання, прискорення та магнітних вимірювань, які можна використовувати для розрахунку висоти та абсолютної орієнтації датчика. Плата працює в діапазоні напруги живлення від 2.5 до 5.5 В і має відстань між висновками 2.54 мм. Код виробника: 2739 LSM6DS33, LIS3MDL і LPS25H мають безліч опцій, що налаштовуються, включаючи динамічно вибирану чутливість для гіроскопа, акселерометра і магнітометра і вибираються дозволи для барометра. Кожен датчик також має вибір швидкості вихідних даних. Доступ до трьох ІС можна отримати через загальний інтерфейс I²C/TWI, що дозволяє звертатися до датчиків індивідуально через одну тактову лінію та одну лінію передачі. Крім того, контакт конфігурації підлеглої адреси дозволяє користувачам змінювати I²C-адреси датчиків та підключати два AltIMU на одній шині I²C. (Додаткові відомості див. у розділі I²C Communication нижче.) Дев'ять незалежних показань обертання, прискорення та магнітного випромінювання надають всі дані, необхідні для створення системи відліку орієнтації та напрямку (AHRS), а показання датчика абсолютного тиску можуть бути легко перетворені на висоти, що дає вам загалом десять незалежних вимірювань (іноді званих 10DOF ). За наявності відповідного алгоритму мікроконтролер або комп'ютер можуть використовувати дані для розрахунку орієнтації та висоти плати AltIMU. Гіроскоп можна використовувати для точного відстеження обертання в коротких часових масштабах, в той час як акселерометр і компас можуть допомогти компенсувати дрейф гіроскопа з часом, забезпечивши абсолютну систему відліку. Несуча плата включає лінійний стабілізатор напруги з низьким падінням напруги, який забезпечує напругу 3,3 В, необхідну для LSM6DS33, LIS3MDL і LPS25H, що дозволяє живити модуль від одного джерела живлення від 2,5 до 5,5 В. Вихід регулятора доступний на контакті VDD і може подавати майже 150 мА зовнішні пристрої. Плата переривання також включає схему, яка зміщує тактову частоту I²C і лінії передачі даних на той же рівень логічної напруги, що і VIN, що поставляється, що спрощує сполучення плати з системами 5 В. Відстань між висновками плати 2.54 мм спрощує її використання зі стандартними макетними платами без паяння та 2.54 мм перфорованими макетними платами. Для використання AltIMU-10 v5 необхідно як мінімум чотири з'єднання: VIN, GND, SCL та SDA. VIN повинен бути підключений до джерела від 2,5 до 5,5 В, GND до 0 вольт, а SCL і SDA повинні бути підключені до шини I²C, що працює на тому ж логічному рівні, що і VIN. (Крім того, якщо ви використовуєте плату з системою 3,3 В, ви можете залишити VIN вимкненим і обійти вбудований регулятор, підключивши 3,3 В безпосередньо до VDD.)
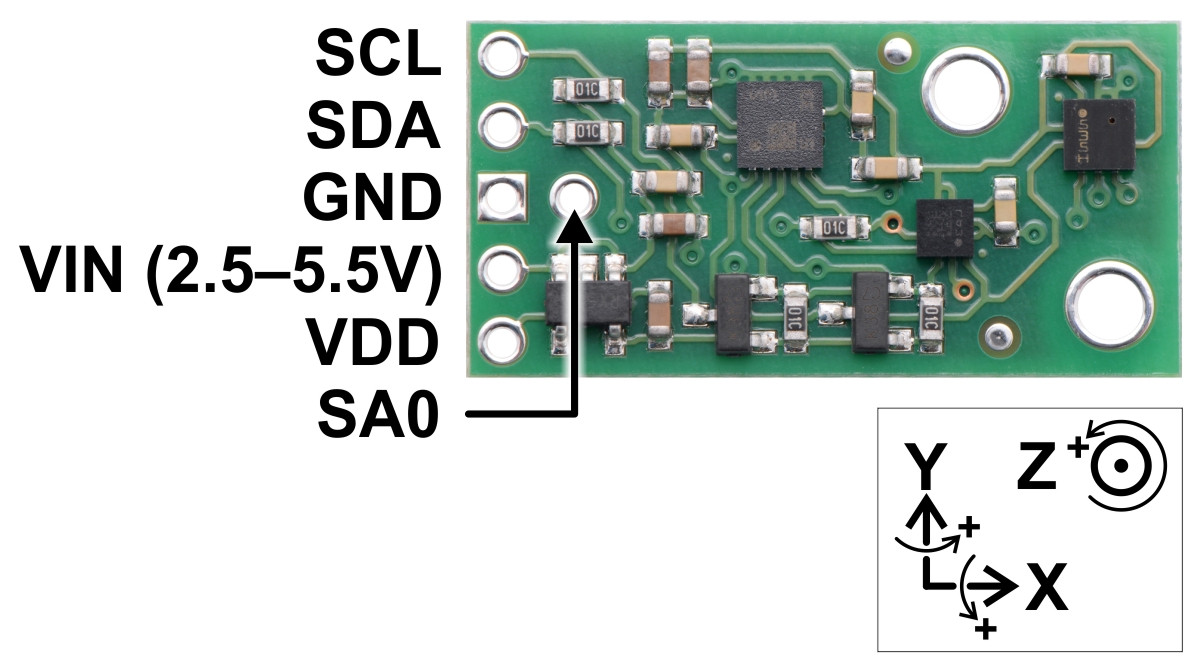
Призначення виводів:
Контакти CS, готовність даних та переривань LSM6DS33, LIS3MDL та LPS25H недоступні на AltIMU-10 v5. Зокрема відсутність контакту CS означає, що додатковий інтерфейс SPI цих ІС недоступний.
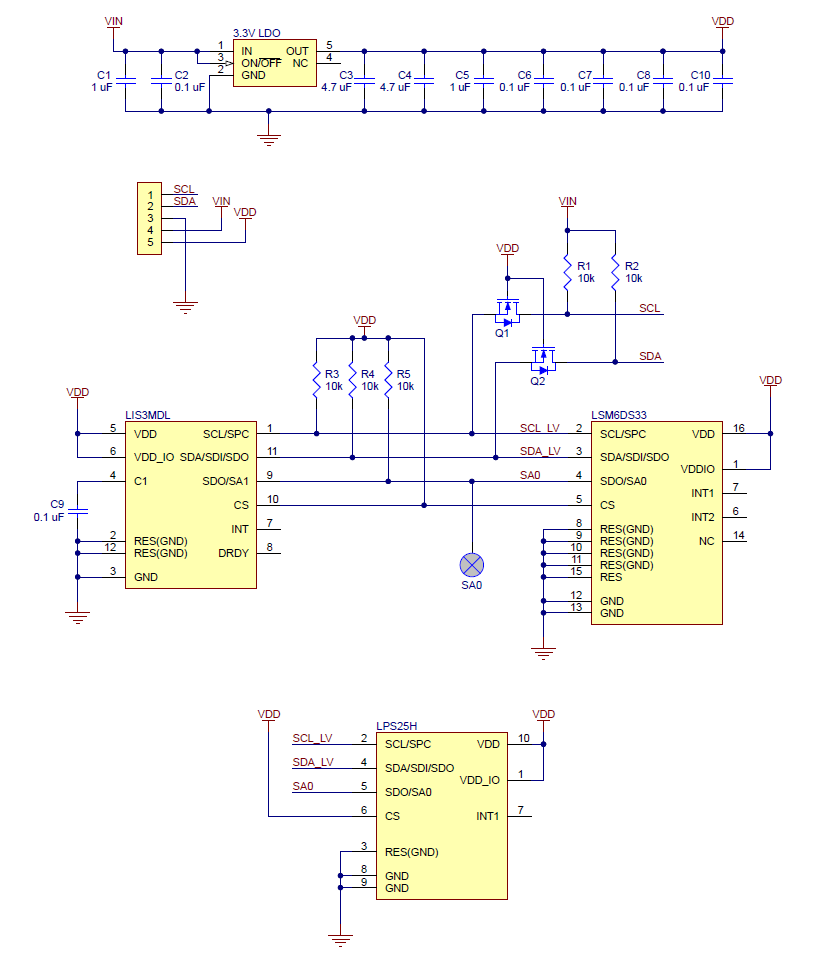
На наведеній вище схемі показані додаткові компоненти, які включає несуча плата, щоб зробити LSM6DS33, LIS3MDL і LPS25H більш простими у використанні, включаючи стабілізатор напруги, який дозволяє живити плату від одного джерела живлення від 2.5 В до 5.5 В і схему перемикання рівня, яка забезпечує зв'язок I²C на тому самому логічному рівні напруги, що і VIN. Інтерфейс I²C: Гіроскоп та акселерометр LSM6DS33, магнітометр LIS3MDL та барометр LPS25H можуть живитися та бути налаштовані через шину I²C. Кожен із чотирьох датчиків діє як підлеглий пристрій на одній шині I²C (тобто їх сигнал тактування та лінії даних пов'язані разом, щоб полегшити зв'язок). Крім того, перемикачі рівня на тактовій частоті I²C (SCL) і лініях передачі даних (SDA) забезпечують зв'язок I²C з мікроконтролерами, що працюють на тій же напрузі, що і VIN (від 2.5 до 5.5 В). Детальний опис протоколів, що використовуються кожним пристроєм, можна знайти в технічному описі LSM6DS33, технічному описі LIS3MDL та технічному описі LPS25H. Більш детальну інформацію про I²C загалом можна знайти у специфікації I²C-шини NXP. LSM6DS33, LIS3MDL та LPS25H мають окремі підпорядковані адреси на шині I²C. Плата з'єднує вибрані контакти підпорядкованої адреси (SA0 або SA1) трьох ІС разом і підтягує їх до VDD через резистор 10 кОм. Ви можете з'єднати контакт із міткою SA0 до спільного проводу, щоб змінити підпорядковану адресу. Це дозволяє мати два AltIMUs (або AltIMU v5 та MinIMU v5), підключені до однієї шини I²C. У наступній таблиці показані підпорядковані адреси датчиків:
Усі три чіпи на AltIMU-10 v5 сумісні зі стандартами I²C у швидкому режимі (400 кГц), а також із нормальним режимом (100 кГц). Приклад коду Написано базову бібліотеку LSM6DS33 Arduino, бібліотеку LIS3MDL Arduino та бібліотеку LPS25H Arduino, які дозволяють легко взаємодіяти AltIMU-10 v5 з Arduino або Arduino-сумісною платою, такою як A-Star. Вони також спрощують налаштування датчиків та зчитування необроблених гіроскопів, акселерометрів, магнітометрів та даних про тиск. Підказки за протоколом: Технічні описи надають всю інформацію, необхідну використання датчиків на AltIMU-10 v5, але вибір важливих деталей може зайняти деякий час. Ось кілька порад для взаємодії та налаштування LSM6DS33, LIS3MDL і LPS25H, які, як ми сподіваємося, допоможуть вам працювати трохи швидше:
На додаток до технічних описів, ST надає посібники із застосування для LSM6DS33 та LIS3MDL, що містять додаткову інформацію та поради щодо їх використання. Характеристики:
Примітки:
Посилання:
|
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
")
")
")
")