|
Каталог
|
Модуль Pololu AltIMU-10 v5 представляет собой инерциальный измерительный блок (IMU) и высотомер, который оснащен тем же гироскопом и акселерометром LSM6DS33 и магнитометром LIS3MDL, что и MinIMU-9 v5, и добавляет цифровой барометр LPS25H. Интерфейс I²C обращается к десяти независимым параметрам давления, вращения, ускорения и магнитных измерений, которые можно использовать для расчета высоты и абсолютной ориентации датчика. Плата работает в диапазоне питающего напряжения от 2.5 до 5.5 В и имеет расстояние между выводами 2.54 мм. Код производителя: 2739 LSM6DS33, LIS3MDL и LPS25H имеют множество настраиваемых опций, включая динамически выбираемую чувствительность для гироскопа, акселерометра и магнитометра и выбираемые разрешения для барометра. Каждый датчик также имеет выбор скоростей выходных данных. Доступ к трем ИС можно получить через общий интерфейс I²C/TWI, что позволяет обращаться к датчикам индивидуально через одну тактовую линию и одну линию передачи данных. Кроме того, контакт конфигурации подчиненного адреса позволяет пользователям изменять I²C-адреса датчиков и подключать два AltIMU на одной шине I²C. (Дополнительные сведения см. в разделе I²C Communication ниже.) Девять независимых показаний вращения, ускорения и магнитного излучения предоставляют все данные, необходимые для создания системы отсчета ориентации и направления (AHRS), а показания датчика абсолютного давления могут быть легко преобразованы в высоты, что дает вам в общей сложности десять независимых измерений (иногда называемых 10DOF). При наличии соответствующего алгоритма микроконтроллер или компьютер может использовать данные для расчета ориентации и высоты платы AltIMU. Гироскоп можно использовать для очень точного отслеживания вращения в коротких временных масштабах, в то время как акселерометр и компас могут помочь компенсировать дрейф гироскопа с течением времени, обеспечив абсолютную систему отсчета. Несущая плата включает в себя линейный стабилизатор напряжения с низким падением напряжения, который обеспечивает напряжение 3,3 В, требуемое для LSM6DS33, LIS3MDL и LPS25H, что позволяет питать модуль от одного источника питания от 2,5 В до 5,5 В. Выход регулятора доступен на контакте VDD и может подавать почти 150 мА на внешние устройства. Плата прерывания также включает в себя схему, которая смещает тактовую частоту I²C и линии передачи данных на тот же уровень логического напряжения, что и поставляемый VIN, что упрощает сопряжение платы с системами 5 В. Расстояние между выводами платы 2.54 мм упрощает ее использование со стандартными макетными платами без пайки и 2.54 мм перфорированными макетными платами. Для использования AltIMU-10 v5 необходимо как минимум четыре соединения: VIN, GND, SCL и SDA. VIN должен быть подключен к источнику от 2,5 В до 5,5 В, GND до 0 вольт, а SCL и SDA должны быть подключены к шине I²C, работающей на том же логическом уровне, что и VIN. (Кроме того, если вы используете плату с системой 3,3 В, вы можете оставить VIN отключенным и обойти встроенный регулятор, подключив 3,3 В непосредственно к VDD.)
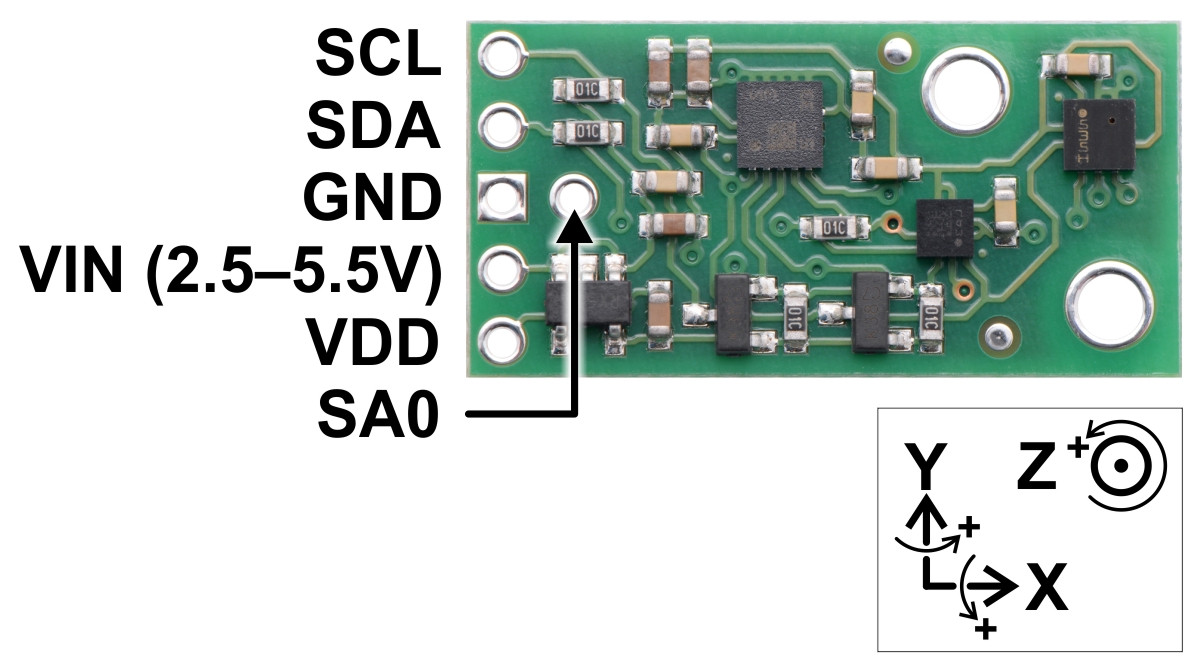
Назначение выводов:
Контакты CS, готовности данных и прерываний LSM6DS33, LIS3MDL и LPS25H недоступны на AltIMU-10 v5. В частности, отсутствие контакта CS означает, что дополнительный интерфейс SPI этих ИС недоступен.
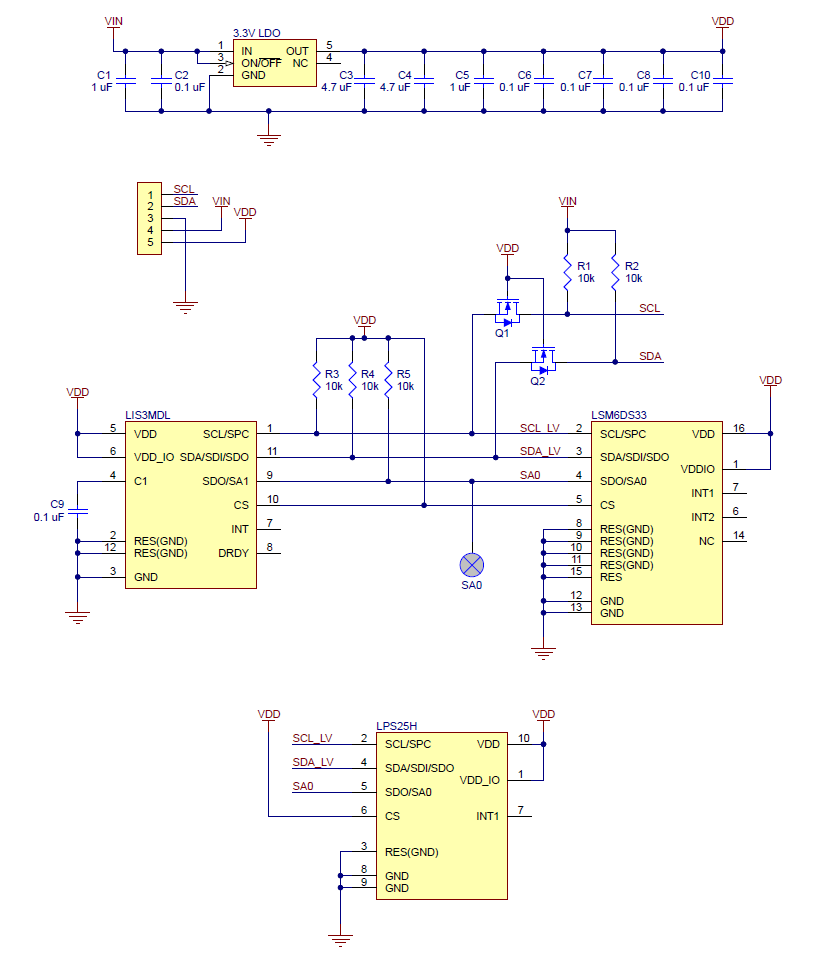
На приведенной выше схеме показаны дополнительные компоненты, которые включает в себя несущая плата, чтобы сделать LSM6DS33, LIS3MDL и LPS25H более простыми в использовании, включая стабилизатор напряжения, который позволяет питать плату от одного источника питания от 2.5 В до 5.5 В и схему переключения уровня, которая обеспечивает связь I²C на том же логическом уровне напряжения, что и VIN. Интерфейс I²C: Гироскоп и акселерометр LSM6DS33, магнитометр LIS3MDL и барометр LPS25H могут быть запрошены и сконфигурированы через шину I²C. Каждый из четырех датчиков действует как подчиненное устройство на одной шине I²C (т.е. их сигнал тактирования и линии данных связаны вместе, чтобы облегчить связь). Кроме того, переключатели уровня на тактовой частоте I²C (SCL) и линиях передачи данных (SDA) обеспечивают связь I²C с микроконтроллерами, работающими на том же напряжении, что и VIN (от 2.5 В до 5.5 В). Подробное описание протоколов, используемых каждым устройством, можно найти в техническом описании LSM6DS33, техническом описании LIS3MDL и техническом описании LPS25H. Более подробную информацию о I²C в целом можно найти в спецификации I²C-шины NXP. LSM6DS33, LIS3MDL и LPS25H имеют отдельные подчиненные адреса на шине I²C. Плата соединяет выбранные контакты подчиненного адреса (SA0 или SA1) трех ИС вместе и подтягивает их все к VDD через резистор 10 кОм. Вы можете соединить контакт с меткой SA0 к общему проводу чтобы изменить подчиненный адрес. Это позволяет иметь два AltIMUs (или AltIMU v5 и MinIMU v5), подключенных к одной шине I²C. В следующей таблице показаны подчиненные адреса датчиков:
Все три чипа на AltIMU-10 v5 совместимы со стандартами I²C в быстром режиме (400 кГц), а также с нормальным режимом (100 кГц). Пример кода Написана базовая библиотека LSM6DS33 Arduino, библиотека LIS3MDL Arduino и библиотека LPS25H Arduino, которые позволяют легко взаимодействовать AltIMU-10 v5 с Arduino или Arduino-совместимой платой, такой как A-Star. Они также упрощают настройку датчиков и считывание необработанных гироскопов, акселерометров, магнитометров и данных о давлении. Подсказки по протоколу: Технические описания предоставляют всю информацию, необходимую для использования датчиков на AltIMU-10 v5, но выбор важных деталей может занять некоторое время. Вот несколько советов для взаимодействия и настройки LSM6DS33, LIS3MDL и LPS25H, которые, как мы надеемся, помогут вам работать немного быстрее:
Характеристики:
Примечания:
Ссылки:
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
")
")
")
")