|
Каталог
|
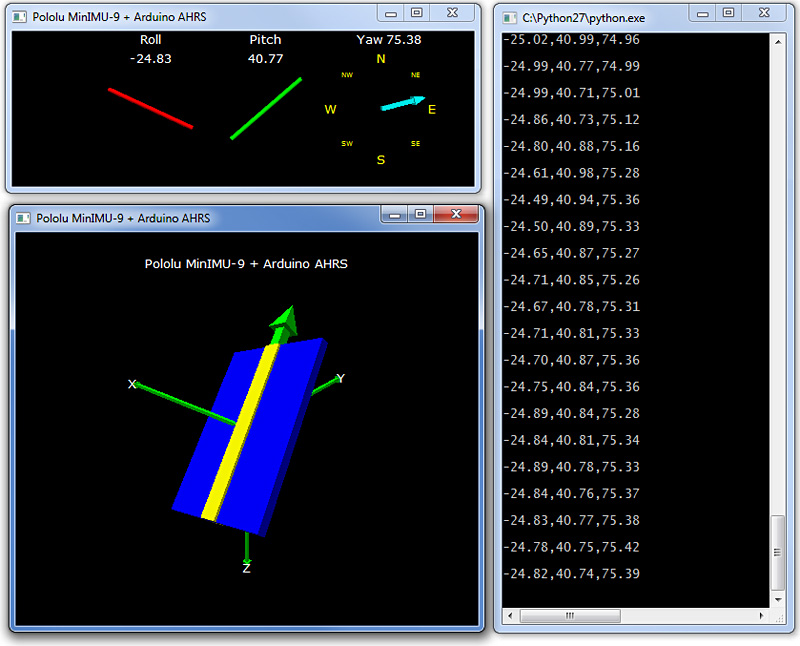
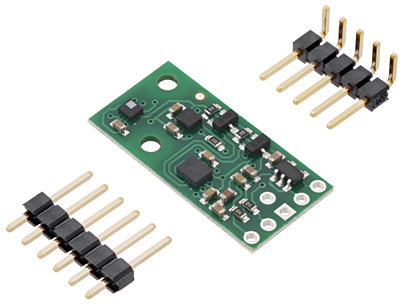
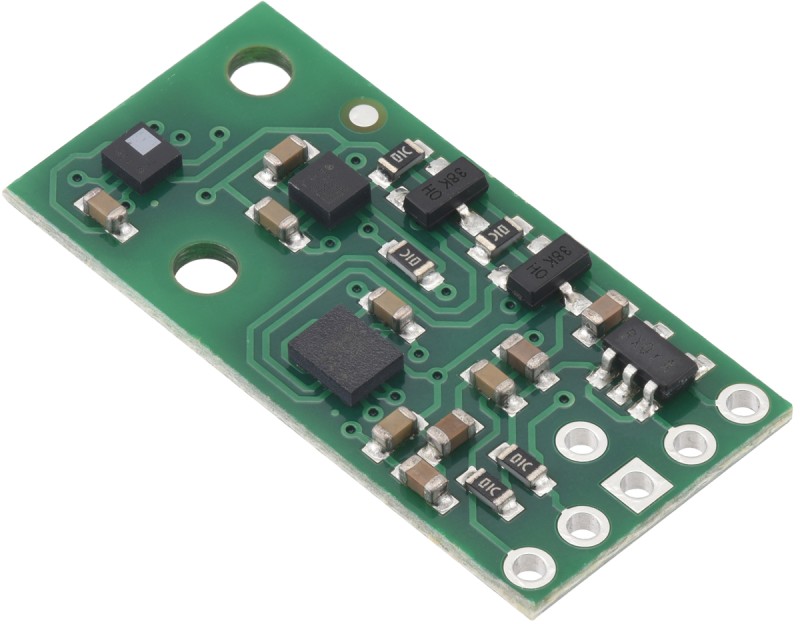
AltIMU-10 v6 - це інерційний вимірювальний блок (IMU) та висотомір, який оснащений гіроскопом та акселерометром LSM6DSO та магнітометром LIS3MDL та цифровим барометром LPS22DF. Інтерфейс I²C забезпечує доступ до десяти незалежних вимірювань тиску, обертання, прискорення та магнітного поля, які можна використовувати для розрахунку висоти та абсолютної орієнтації датчика. Плата працює від 2.5 до 5.5 і має відстань між контактами 2.54 мм. Код виробника: 2863 Pololu AltIMU-10 v6 - це компактна плата, яка поєднує 3-осьовий гіроскоп і 3-осьовий акселерометр LSM6DSO від ST, 3-осьовий магнітометр LIS3MDL і цифровий барометр LPS22DF для формування інерційного вимірювального блоку (IMU) та висотоміра. Ці датчики - відмінні мікросхеми, але їх невеликі корпуси ускладнюють їхнє використання звичайним студентом або аматором. Вони також працюють при напрузі нижче 3.6, що може утруднити взаємодію з мікроконтролерами, що працюють при 5 В. AltIMU-10 вирішує ці проблеми, включивши додаткову електроніку, включаючи регулятор напруги і схему зсуву рівня, зберігаючи при цьому загальний розмір максимально компактним. Плата поставляється повністю укомплектованою своїми SMD-компонентами, включаючи LSM6DSO, LIS3MDL і LPS22DF, як показано на зображенні продукту. AltIMU-10 v6 сумісний з висновків з MinIMU-9 v6 та пропонує ту ж функціональність, доповнену цифровим барометром, який можна використовувати для отримання вимірювань тиску та висоти. Він включає другий монтажний отвір і всього на 0,2″ довше за MinIMU-9. Будь-який код, написаний MinIMU-9 v6, повинен також працювати з AltIMU-10 v6. LSM6DSO, LIS3MDL і LPS22DF мають безліч опцій, що настроюються, включаючи динамічно вибирану чутливість для гіроскопа, акселерометра і магнітометра, а також обираються дозволи для барометра. Кожен датчик також має вибір вихідних швидкостей передачі. Доступ до трьох мікросхем можна отримати через загальний інтерфейс I²C/TWI, що дозволяє індивідуально звертатися до датчиків через одну лінію синхронізації та одну лінію даних. Крім того, виведення конфігурації підлеглої адреси дозволяє користувачам змінювати адреси датчиків I²C і підключати два AltIMU до однієї шини I²C. (Додаткову інформацію див. у розділі «Зв'язок I²C» нижче.) Дев'ять незалежних показань обертання, прискорення та магнітного поля надають всі дані, необхідні для створення системи відліку орієнтації та напрямки (AHRS), а показання датчика абсолютного тиску можна легко перетворити на висоти, що дає вам загалом десять незалежних вимірювань (іноді званих 10DOF) . З відповідним алгоритмом мікроконтролер або комп'ютер можуть використовувати ці дані для розрахунку орієнтації та висоти плати AltIMU. Гіроскоп можна використовувати для точного відстеження обертання в короткі терміни, в той час як акселерометр і компас можуть допомогти компенсувати дрейф гіроскопа з часом, надаючи абсолютну систему відліку. Відповідні осі двох чіпів вирівняно на платі для полегшення цих обчислень злиття датчиків. Візуалізація орієнтації AHRS, розрахованої за показаннями MinIMU-9:
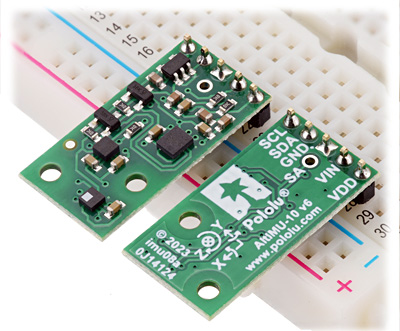
Несуча плата включає лінійний регулятор напруги з малим падінням напруги, який забезпечує напругу живлення 3.3 В, необхідні для LSM6DSO, LIS3MDL і LPS22DF, що дозволяє модулю живитися від одного джерела живлення 2.5 В - 5.5 В. Вихід регулятора доступний на виводі VDD і може подавати майже 150 мА на зовнішні пристрої. Плата комутації також включає схему, яка зміщує лінії синхронізації і даних I²C на той же рівень логічної напруги, що і VIN, що поставляється, що спрощує сполучення плати з системами 5 В. Відстань між висновками плати 2,54 мм полегшує її використання зі стандартними безпаєчними макетними платами та перфорованими платами з кроком 2.54 мм. Технічні характеристики:
Комплектація: У комплект входять смужка 1х6 штирьових контактів з кроком 2.54 мм і смужка 1х5 штирьових контактів 2.54 мм під прямим кутом, як показано на малюнку нижче. Ви можете припаяти смужку штирьових контактів за вашим вибором до плати для використання з користувальницькими кабелями або безпайковими макетними платами або припаяти дроти безпосередньо до самої плати для більш компактної установки. На платі є два монтажні отвори, які підходять для гвинтів #2 або M2 (не входять до комплекту).
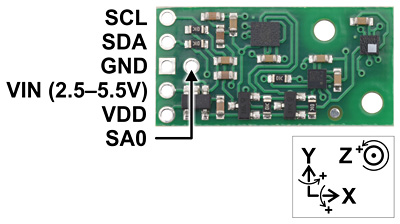
Використання AltIMU-10 v6: Підключення: Для використання AltIMU-10 необхідно щонайменше чотири з'єднання: VIN, GND, SCL та SDA. VIN слід підключити до джерела 2.5 - 5.5, GND - до 0 вольт, а SCL і SDA слід підключити до шини I²C, що працює на тому ж логічному рівні, що і VIN. (В якості альтернативи, якщо ви використовуєте плату з системою 3.3, ви можете залишити VIN вимкненим і обійти вбудований регулятор, підключивши 3.3 безпосередньо до VDD.) Розпинування гіроскопа, акселерометра, компаса та висотоміра AltIMU-10 v6:
Розпинування:
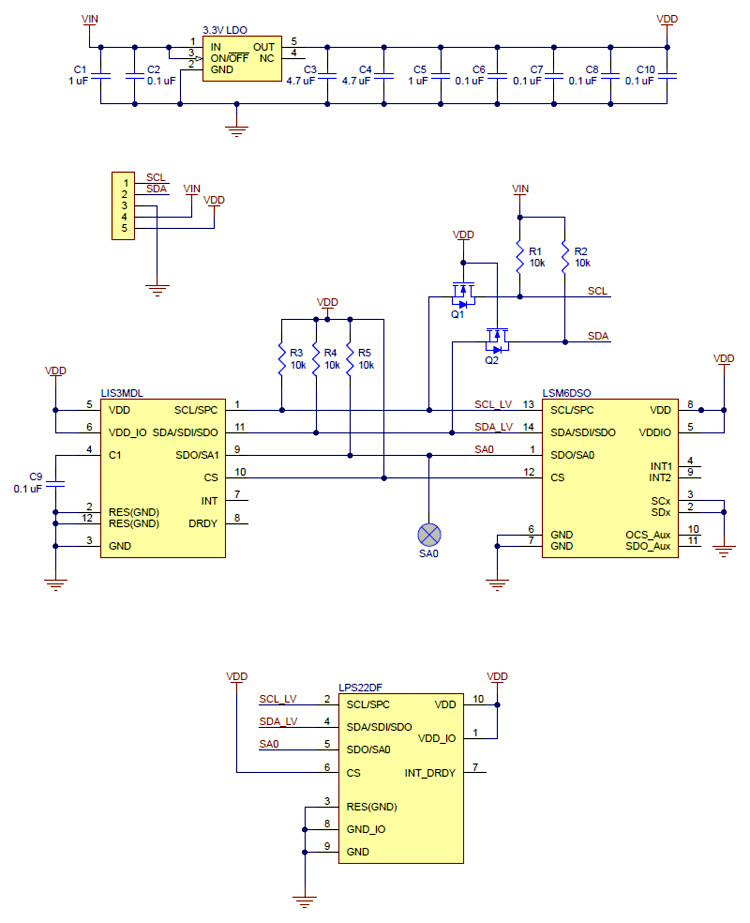
Контакти CS, готовність даних та переривання LSM6DO, LIS3MDL та LPS22DF недоступні на AltIMU-10 v6. Зокрема відсутність контакту CS означає, що додатковий інтерфейс SPI цих мікросхем недоступний. Якщо вам потрібні ці функції, розгляньте можливість використання інших платіжників LSM6DSO, LIS3MDL та LPS22DF. Принципова схема:
На схемі вище показані додаткові компоненти, що входять до складу несучої плати, щоб зробити LSM6DSO, LIS3MDL і LPS22DF більш простими у використанні, включаючи стабілізатор напруги, який дозволяє живити плату від одного джерела живлення 2.5 - 5.5 В, і схему зсуву рівня, яка забезпечує зв'язок I²C тому ж рівні логічного напруги, як і VIN. Ця схема також доступна у вигляді pdf-файлу, що завантажується. I²C-комунікація: Гіроскоп та акселерометр LSM6DSO, магнітометр LIS3MDL та барометр LPS22DF можна опитувати та налаштовувати через шину I²C. Кожен із чотирьох датчиків діє як підлеглий пристрій на тій же шині I²C (тобто їх лінії синхронізації та даних пов'язані разом для полегшення зв'язку). Крім того, зсуву рівня на лініях синхронізації I²C (SCL) і даних (SDA) забезпечують зв'язок I²C з мікроконтролерами, що працюють при тій же напрузі, що і VIN (від 2.5 до 5.5 В). Детальний опис протоколів, що використовуються кожним пристроєм, можна знайти в технічному описі LSM6DSO, технічному описі LIS3MDL та технічному описі LPS22DF. Більш детальну інформацію про I²C загалом можна знайти у специфікації шини I²C компанії NXP. LSM6DSO, LIS3MDL та LPS22DF мають окремі підлеглі адреси на шині I²C. Плата з'єднує висновки вибору підлеглого адреси (SA0 або SA1) трьох мікросхем разом і підтягує їх до VDD через резистор 10 кОм. Ви можете подати на висновок, позначений SA0, низький рівень, щоб змінити підлеглу адресу. Це дозволяє вам мати два AltIMU (або AltIMU v6 та MinIMU v6), підключені до однієї шини I²C. У наступній таблиці показані підпорядковані адреси датчиків:
Усі три мікросхеми AltIMU-10 v6 відповідають стандартам I²C швидкого режиму (400 кГц), а також звичайного режиму. Зразок коду: Написано базову бібліотеку LSM6 Arduino , бібліотеку LIS3MDL Arduino та бібліотеку LPS Arduino, які спрощують сполучення AltIMU-10 v6 з платою, сумісною з Arduino, наприклад, A-Star . Вони також спрощують налаштування датчиків та зчитування необроблених даних гіроскопа, акселерометра, магнітометра та тиску. Для демонстрації того, що можна зробити з цими даними, ви можете перетворити Arduino, підключений до AltIMU-10 v6, на систему орієнтації та напрямки, або AHRS, за допомогою цієї програми Arduino. Вона використовує дані з AltIMU-10 v6 для розрахунку передбачуваних кутів крену, тангажу та нишпорення, і ви можете візуалізувати виведення AHRS за допомогою 3D-тестової програми на вашому ПК (як показано на знімку екрана вище). Це програмне забезпечення засноване на роботі Хорді Муньоса, Вільяма Премерлані, Хосе Хуліо та Дуга Вайбеля. Поради щодо протоколу: У технічних описах міститься вся інформація, необхідна використання датчиків на AltIMU-10 v6, але вибір важливих деталей може зайняти деякий час. Ось кілька вказівок щодо зв'язку та налаштування LSM6DSO, LIS3MDL і LPS22DF, які допоможуть вам почати роботу трохи швидше: Гіроскоп, акселерометр, магнітометр та датчик тиску за умовчанням перебувають у режимі зниженого енергоспоживання. Їх потрібно включити, встановивши правильні регістри конфігурації. Ви можете зчитувати або записувати дані в кілька регістрів в LIS3MDL за допомогою однієї команди I²C, затверджуючи старший біт адреси регістру, щоб увімкнути автоматичне збільшення адреси. Адреса регістру в LSM6DSO і LPS22DF автоматично збільшується під час доступу до кількох байтів, що дозволяє зчитувати або записувати кілька регістрів в одній команді I²C. На відміну від того, як працюють інші датчики ST, автоінкремент включений за замовчуванням; ви можете вимкнути його для кожного чіпа за допомогою регістра конфігурації. Крім технічних описів, ST надає примітки щодо застосування для LSM6DSO, LIS3MDL і LPS22DF, що містять додаткову інформацію та поради щодо їх використання. Посилання:
Рекомендовані посилання: Відгуки покупців про Модуль Pololu AltIMU-10 v6 гироскоп, акселерометр, компас и барометр (LSM6DSO, LIS3MDL, LPS25H) поки немає жодного відгуку - станьте першим!
Написати відгук: Є питання по "Модуль Pololu AltIMU-10 v6 гіроскоп, акселерометр, компас та барометр (LSM6DSO, LIS3MDL, LPS25H)" ?
Шановні друзі! Ми намагаємося тримати на сайті інформацію про наявність товарів та ціни на них в актуальному стані. Коригування відбуваються постійно. Якщо ви знаходите ціну на товар завищеною, напишіть нам про це із посиланням на товар. Ми розглянемо лист та чи обгрунтуємо ціну, чи підкоригуємо її. Асортимент магазину дуже великий та іноді бувають помилки в ціноутворенні, особливо при скачках курсу долара. Дякуємо за розуміння.
|
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний

")
")
")
")