|
Каталог
|
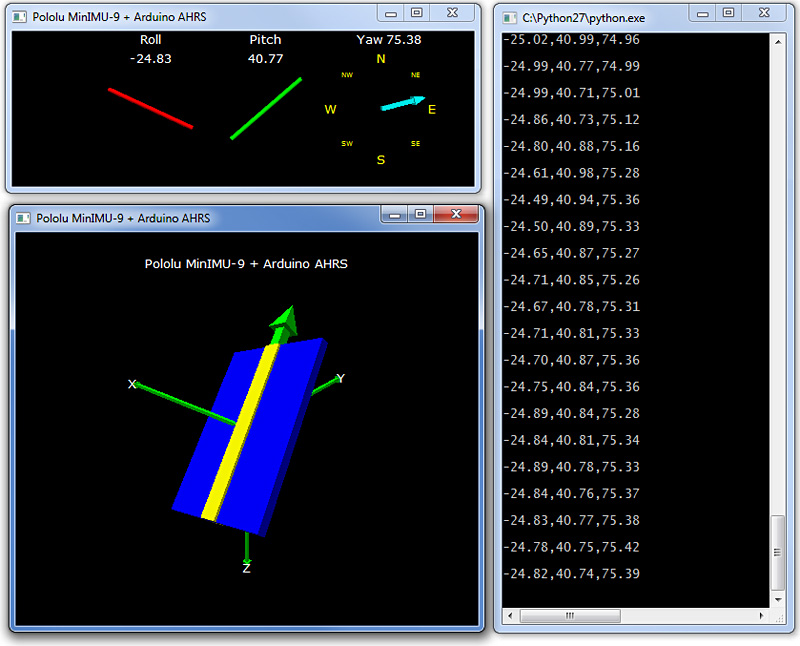
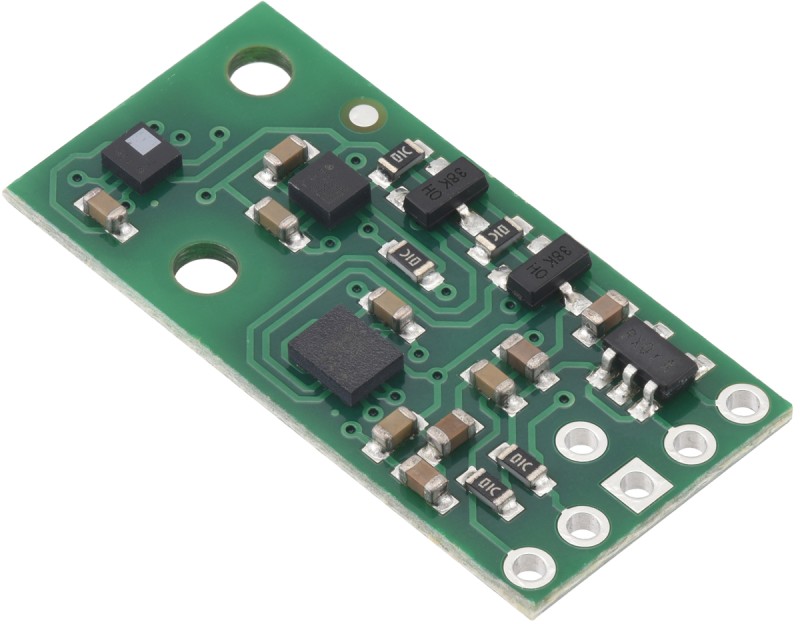
AltIMU-10 v6 - это инерциальный измерительный блок (IMU) и высотомер, который оснащен гироскопом и акселерометром LSM6DSO и магнитометром LIS3MDL и цифровым барометром LPS22DF. Интерфейс I²C обеспечивает доступ к десяти независимым измерениям давления, вращения, ускорения и магнитного поля, которые можно использовать для расчета высоты и абсолютной ориентации датчика. Плата работает от 2.5 до 5.5 В и имеет расстояние между контактами 2.54 мм. Код производителя: 2863 Pololu AltIMU-10 v6 - это компактная плата, которая объединяет 3-осевой гироскоп и 3-осевой акселерометр LSM6DSO от ST, 3-осевой магнитометр LIS3MDL и цифровой барометр LPS22DF для формирования инерциального измерительного блока (IMU) и высотомера. Эти датчики - отличные микросхемы, но их небольшие корпуса затрудняют их использование обычным студентом или любителем. Они также работают при напряжении ниже 3.6 В, что может затруднить взаимодействие с микроконтроллерами, работающими при 5 В. AltIMU-10 решает эти проблемы, включив дополнительную электронику, включая регулятор напряжения и схему сдвига уровня, сохраняя при этом общий размер максимально компактным. Плата поставляется полностью укомплектованной своими SMD-компонентами, включая LSM6DSO, LIS3MDL и LPS22DF, как показано на изображении продукта. AltIMU-10 v6 совместим по выводам с MinIMU-9 v6 и предлагает ту же функциональность, дополненную цифровым барометром, который можно использовать для получения измерений давления и высоты. Он включает второе монтажное отверстие и всего на 0.2″ длиннее MinIMU-9. Любой код, написанный для MinIMU-9 v6, должен также работать с AltIMU-10 v6. LSM6DSO, LIS3MDL и LPS22DF имеют множество настраиваемых опций, включая динамически выбираемую чувствительность для гироскопа, акселерометра и магнитометра, а также выбираемые разрешения для барометра. Каждый датчик также имеет выбор выходных скоростей передачи данных. Доступ к трем микросхемам можно получить через общий интерфейс I²C/TWI, что позволяет индивидуально обращаться к датчикам через одну линию синхронизации и одну линию данных. Кроме того, вывод конфигурации подчиненного адреса позволяет пользователям изменять адреса I²C датчиков и подключать два AltIMU к одной шине I²C. (Дополнительную информацию см. в разделе «Связь I²C» ниже.) Девять независимых показаний вращения, ускорения и магнитного поля предоставляют все данные, необходимые для создания системы отсчета ориентации и направления (AHRS), а показания датчика абсолютного давления можно легко преобразовать в высоты, что дает вам в общей сложности десять независимых измерений (иногда называемых 10DOF). С соответствующим алгоритмом микроконтроллер или компьютер могут использовать эти данные для расчета ориентации и высоты платы AltIMU. Гироскоп можно использовать для очень точного отслеживания вращения в короткие сроки, в то время как акселерометр и компас могут помочь компенсировать дрейф гироскопа с течением времени, предоставляя абсолютную систему отсчета. Соответствующие оси двух чипов выровнены на плате для облегчения этих вычислений слияния датчиков. Визуализация ориентации AHRS, рассчитанной по показаниям MinIMU-9:
Несущая плата включает в себя линейный регулятор напряжения с малым падением напряжения, который обеспечивает напряжение питания 3.3 В, необходимые для LSM6DSO, LIS3MDL и LPS22DF, что позволяет модулю питаться от одного источника питания 2.5 В - 5.5 В. Выход регулятора доступен на выводе VDD и может подавать почти 150 мА на внешние устройства. Плата коммутации также включает в себя схему, которая смещает линии синхронизации и данных I²C на тот же уровень логического напряжения, что и поставляемый VIN, что упрощает сопряжение платы с системами 5 В. Расстояние между выводами платы 2,54 мм облегчает ее использование со стандартными беспаечными макетными платами и перфорированными платами с шагом 2.54 мм. Технические характеристики:
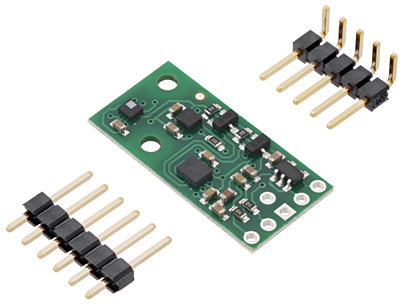
Комплектация: В комплект входят полоска 1×6 штыревых контактов с шагом 2,54 мм и полоска 1×5 штыревых контактов 2,54 мм под прямым углом , как показано на рисунке ниже. Вы можете припаять полоску штыревых контактов по вашему выбору к плате для использования с пользовательскими кабелями или беспаечными макетными платами или припаять провода непосредственно к самой плате для более компактной установки. На плате есть два монтажных отверстия, которые подходят для винтов #2 или M2 (не входят в комплект).
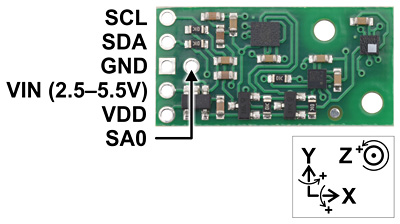
Использование AltIMU-10 v6: Подключение: Для использования AltIMU-10 необходимо минимум четыре соединения: VIN, GND, SCL и SDA. VIN следует подключить к источнику 2.5 - 5.5 В, GND - к 0 вольт, а SCL и SDA следует подключить к шине I²C, работающей на том же логическом уровне, что и VIN. (В качестве альтернативы, если вы используете плату с системой 3.3 В, вы можете оставить VIN отключенным и обойти встроенный регулятор, подключив 3.3 В напрямую к VDD.) Распиновка гироскопа, акселерометра, компаса и высотомера AltIMU-10 v6:
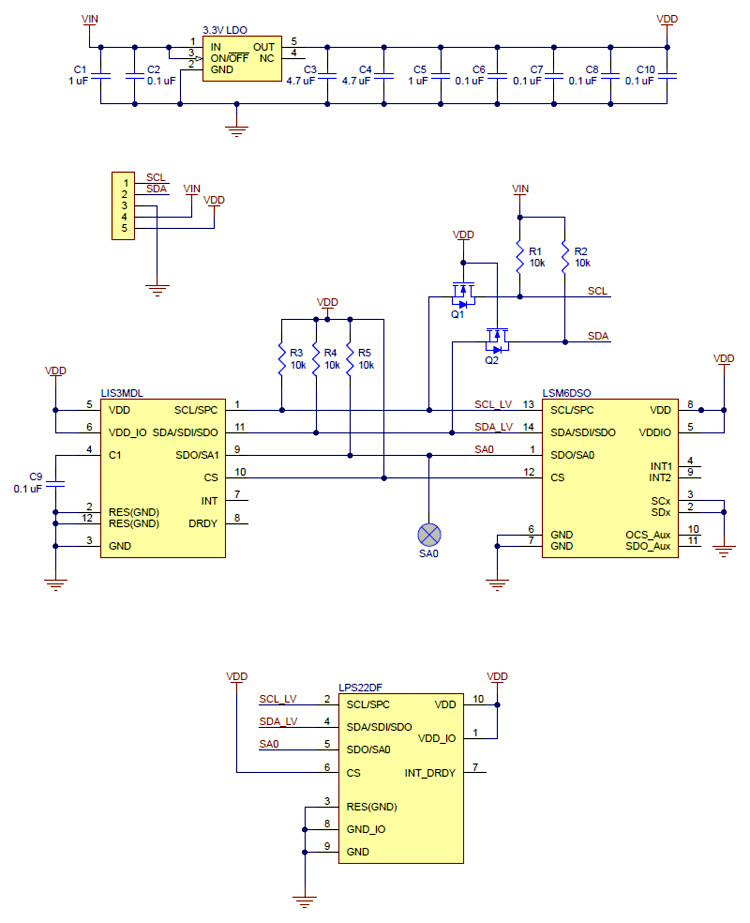
Распиновка: SCL - Линия синхронизации I²C со смещенным уровнем: ВЫСОКИЙ уровень - VIN, НИЗКИЙ уровень - 0 В SDA - Линия данных I²C со смещенным уровнем: ВЫСОКИЙ уровень - VIN, НИЗКИЙ уровень - 0 В GND - Заземление (0 В) для источника питания. Ваш источник управления I²C также должен иметь общее заземление с этой платой. VIN - Это основное подключение питания от 2.5 В до 5.5 В. Сдвиги уровня SCL и SDA подтягивают старшие биты шины I²C до этого уровня. VDD - Выход стабилизатора напряжения 3.3 В или низковольтный источник питания логики, в зависимости от VIN. Когда VIN подается и больше 3.3 В, VDD является регулируемым выходом 3.3 В, который может подавать до 150 мА на внешние компоненты. В качестве альтернативы, при взаимодействии с системой 2.5 В - 3.3 В, VIN можно оставить отключенным и питание можно подавать непосредственно на VDD. Никогда не подавайте напряжение на VDD, если подключен VIN, и никогда не подавайте напряжение более 3.6 В на VDD. SA0 - Вход логического уровня 3.3 В для определения подчиненных адресов I²C трех микросхем (см. ниже). По умолчанию он подтянут к высокому уровню через резистор 10 кОм. Этот вывод не имеет сдвига уровня и не выдерживает 5 В. Контакты CS, готовности данных и прерывания LSM6DO, LIS3MDL и LPS22DF недоступны на AltIMU-10 v6. В частности, отсутствие контакта CS означает, что дополнительный интерфейс SPI этих микросхем недоступен. Если вам нужны эти функции, рассмотрите возможность использования других плат- носителей LSM6DSO, LIS3MDL и LPS22DF. Принципиальная схема:
На схеме выше показаны дополнительные компоненты, входящие в состав несущей платы, чтобы сделать LSM6DSO, LIS3MDL и LPS22DF более простыми в использовании, включая стабилизатор напряжения, который позволяет питать плату от одного источника питания 2.5 В - 5.5 В, и схему сдвига уровня, которая обеспечивает связь I²C на том же уровне логического напряжения, что и VIN. Эта схема также доступна в виде загружаемого pdf-файла. I²C-коммуникация: Гироскоп и акселерометр LSM6DSO, магнитометр LIS3MDL и барометр LPS22DF можно опрашивать и настраивать через шину I²C. Каждый из четырех датчиков действует как подчиненное устройство на той же шине I²C (т. е. их линии синхронизации и данных связаны вместе для облегчения связи). Кроме того, сдвига уровня на линиях синхронизации I²C (SCL) и данных (SDA) обеспечивают связь I²C с микроконтроллерами, работающими при том же напряжении, что и VIN (от 2.5 В до 5.5 В). Подробное описание протоколов, используемых каждым устройством, можно найти в техническом описании LSM6DSO, техническом описании LIS3MDL и техническом описании LPS22DF. Более подробную информацию об I²C в целом можно найти в спецификации шины I²C компании NXP. LSM6DSO, LIS3MDL и LPS22DF имеют отдельные подчиненные адреса на шине I²C. Плата соединяет выводы выбора подчиненного адреса (SA0 или SA1) трех микросхем вместе и подтягивает их все к VDD через резистор 10 кОм. Вы можете подать на вывод, обозначенный как SA0, низкий уровень, чтобы изменить подчиненный адрес. Это позволяет вам иметь два AltIMU (или AltIMU v6 и MinIMU v6), подключенных к одной шине I²C. В следующей таблице показаны подчиненные адреса датчиков:
Все три микросхемы AltIMU-10 v6 соответствуют стандартам I²C быстрого режима (400 кГц), а также обычного режима. Образец кода: Написана базовая библиотека LSM6 Arduino , библиотека LIS3MDL Arduino и библиотека LPS Arduino, которые упрощают сопряжение AltIMU-10 v6 с платой, совместимой с Arduino, например, A-Star . Они также упрощают настройку датчиков и считывание необработанных данных гироскопа, акселерометра, магнитометра и давления. Для демонстрации того, что можно сделать с этими данными, вы можете превратить Arduino, подключенный к AltIMU-10 v6, в систему ориентации и направления, или AHRS, с помощью этой программы Arduino. Она использует данные из AltIMU-10 v6 для расчета предполагаемых углов крена, тангажа и рыскания, и вы можете визуализировать вывод AHRS с помощью 3D-тестовой программы на вашем ПК (как показано на снимке экрана выше). Это программное обеспечение основано на работе Хорди Муньоса, Уильяма Премерлани, Хосе Хулио и Дуга Вайбеля. Советы по протоколу: В технических описаниях содержится вся информация, необходимая для использования датчиков на AltIMU-10 v6, но выбор важных деталей может занять некоторое время. Вот несколько указаний по связи и настройке LSM6DSO, LIS3MDL и LPS22DF, которые помогут вам начать работу немного быстрее: Гироскоп, акселерометр, магнитометр и датчик давления по умолчанию находятся в режиме пониженного энергопотребления. Их необходимо включить, установив правильные регистры конфигурации. Вы можете считывать или записывать данные в несколько регистров в LIS3MDL с помощью одной команды I²C, утверждая старший бит адреса регистра, чтобы включить автоматическое увеличение адреса. Адрес регистра в LSM6DSO и LPS22DF автоматически увеличивается во время доступа к нескольким байтам, что позволяет вам считывать или записывать несколько регистров в одной команде I²C. В отличие от того, как работают некоторые другие датчики ST, автоинкремент включен по умолчанию; вы можете отключить его для каждого чипа с помощью регистра конфигурации. Помимо технических описаний, ST предоставляет примечания по применению для LSM6DSO, LIS3MDL и LPS22DF, содержащие дополнительную информацию и советы по их использованию. Ссылки:
Рекомендованные ссылки: Отзывы покупателей про Модуль Pololu AltIMU-10 v6 гироскоп, акселерометр, компас и барометр (LSM6DSO, LIS3MDL, LPS25H) пока нет ни одного отзыва - станьте первым!
Написать отзыв: Есть вопросы по "Модуль Pololu AltIMU-10 v6 гироскоп, акселерометр, компас и барометр (LSM6DSO, LIS3MDL, LPS25H)" ?
Дорогие друзья! Мы стараемся держать на сайте информацию про наличие товаров и цены на них в АКТУАЛЬНОМ состоянии. Корректировки происходят постоянно. Если вы находите цену на товар завышенной, напишите нам про это с указанием ссылки на товар. Мы рассмотрим письмо и или обоснуем цену, или подкорректируем ее. Ассортимент магазина очень большой и иногда бывают ошибки в ценообразовании, особенно при скачках курса доллара. Благодарим за понимание.
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной

")
")
")
")