|
Каталог
|
Самодельный драйвер для мощных моторов2016-06-16 Всі статті →Петр Для управления мощными моторами через Ардуино нужно выбрать один из вариантов:
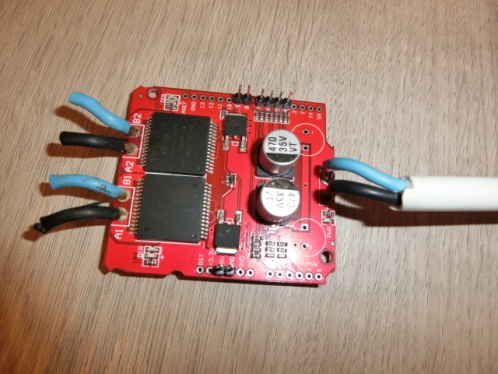
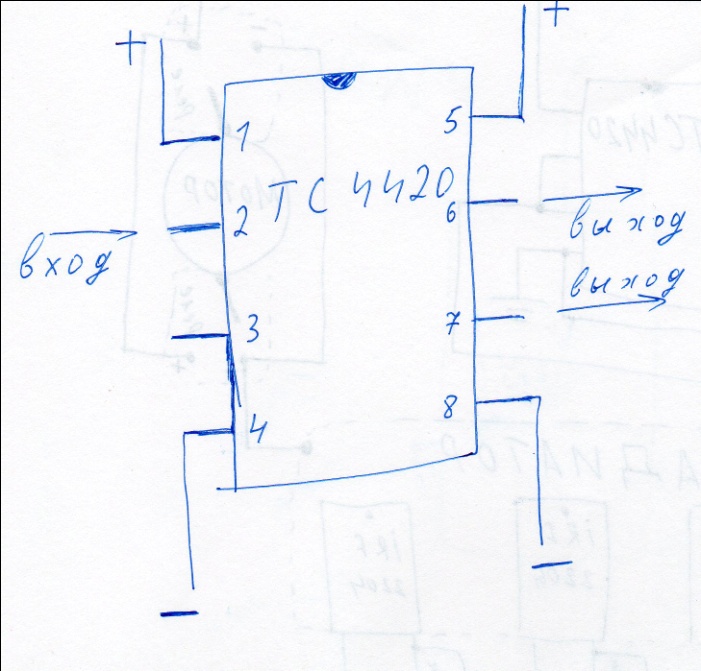
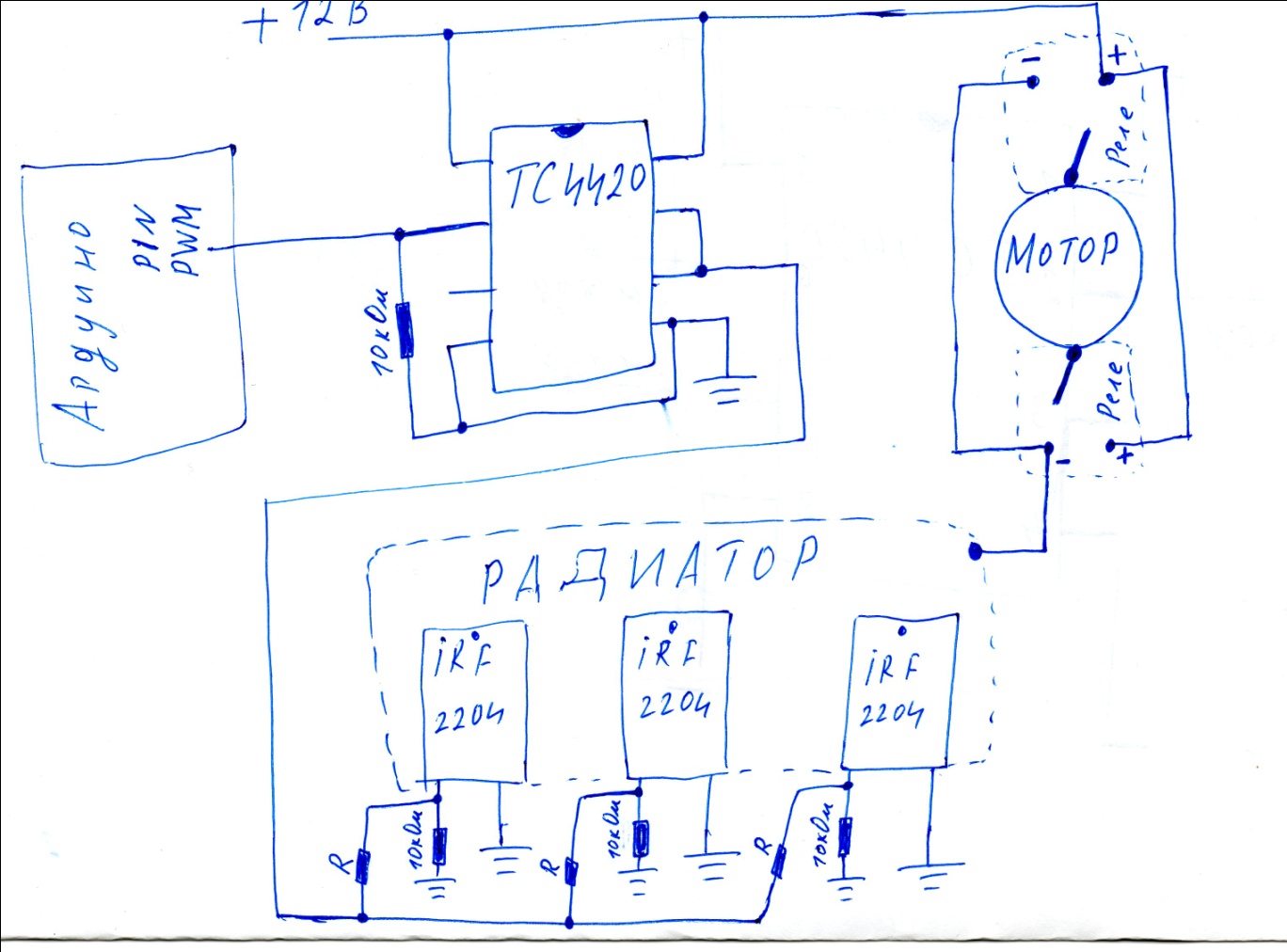
Для первого варианта нужно идеально подобрать драйвер по вашим запросам – вольтаж и ампераж моторов и обеспечить драйвер требуемым отводом тепла – поставить радиатор, а возможно и вентилятор для обдува. Второй вариант запрашивает очень хорошее понимание электроники – нужно уметь рассчитать все элементы схемы: транзисторы n и p типа, резисторы, конденсаторы, диоды,… Кроме того при выходе из строя одного элемента вся система перестает работать и быстро заменить что то не так просто. Третий вариант подразумевает получение ШИМ контроля оборотов мотора в одном направлении, а два реле обеспечат смену полярности питания мотора, что даст ему обратный ход. Большой плюс такого варианта в том, что можно иметь на борту несколько транзисторов (один не подключен – в запасе) и при перегрузке или сгорании основных можно на резервном транзисторе «доехать домой». И даже при поломке реле все равно можно иметь ход как минимум в одном направлении. Да и по затратам и надежности этот вариант был выбран как оптимальный. Теперь по порядку: Выбираем транзистор – берем полевой транзистор (мосфет). Тут есть два варианта по типу управляющего сигнала: Логические транзисторы – управляются 5 вольтами – можно прямо с Ардуино. Остальные транзисторы управляются напряжением от 10в (хотя практика показала что не логический полевик нормально работает и от 5 вольт). Для их использования нужно после Ардуино поднять напряжение, можно использовать готовый драйвер мосфета. Итак, подсчитав более выгодный вариант (логические транзисторы значительно дороже) был выбран вариант с использованием драйвера мосфета в виде микросхемы ТС 4420. Она имеет 8 ножек:
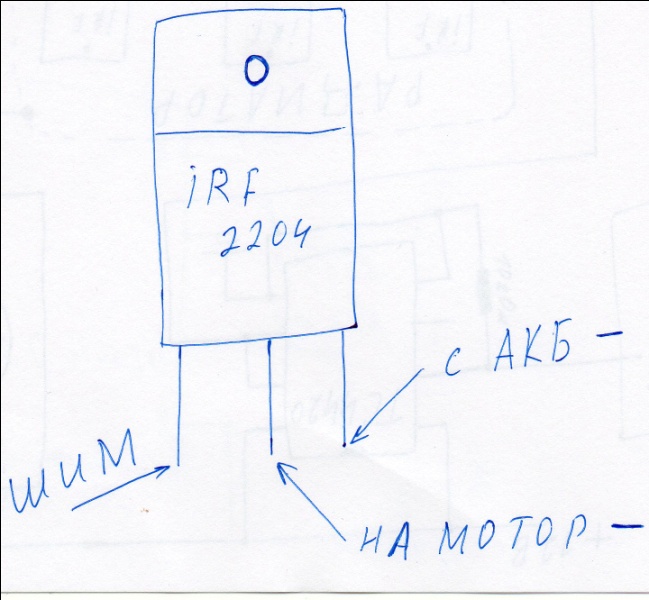
1 и 5 питание + 4 и 8 питание – 2 вход (от Ардуино) 6 и 7 выход (на транзисторы) Транзисторы нужно выбирать с запасом по напряжению и току, если углубляться в выбор сильнее, то нужно обратить внимание на сопротивление открытого транзистора, время открытия, закрытия,… В идеале транзистор должен открываться и закрываться очень быстро и тогда он не будет греться и КПД системы будет повыше. В нашей схеме были использованы транзисторы IRF 2204, с током 210А, но поскольку были сомнения по поводу тонких ножек, то на каждый мотор стоит по 3 транзистора – в параллельном соединении (хотя 2 достаточно), один из них можно держать в запасе. Подключаем транзистор так:
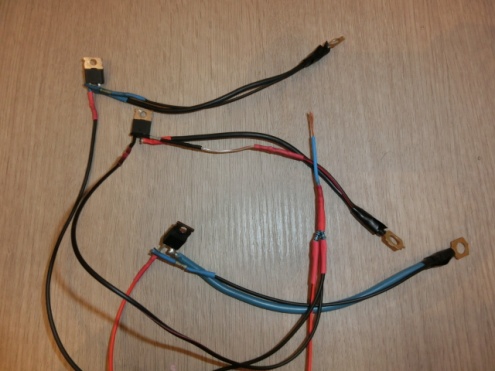
Левая ножка – управляющий сигнал с ШИМ (берем с выхода драйвера мосфета). Средняя ножка – выход на мотор, но для удобства ее можно отломать (чтобы не мешала при пайке), а взять выход с корпуса транзистора (через отверстие корпус соединен с радиатором). Важно не забыть на первую (левую) ножку припаять резистор примерно 10 кОм и пустить его на минус – так база транзистора всегда будет притянута к земле – чем она надежно закроет транзистор даже при обрыве управляющего провода. Теперь выбираем по току и управляющему напряжению реле. В нашем случае реле управляется 12 вольтами – пришлось ставить еще по одному не очень мощному транзистору не логического уровня, который при сигнале с Ардуино (напрямую без драйвера) подает на реле 12 вольт и меняет положение его контактов. Таким образом мы уже получили готовую схему для нашего силового драйвера:
Если интересно, то можно посмотреть схему в работе на большой робоплатформе с двумя моторами по примерно 700 Вт каждый и напряжением 12в:
Так же смотрите другие видео по созданию этого робота на канале автора: https://www.youtube.com/user/petromeb/videos
Обсудить робота и понаблюдать за прогрессом работы можно на форуме.
Загальна оцінка:

Оцінка
"Самодельный драйвер для мощных моторов"
зроблена на основі 1 оцінки 1 клієнтських відгуку. Дякуємо Вам за звернення! Ваш відгук з'явиться після модерації адміністратором.
Вв
14.10.2023 23:24:41


В 2016-м рисовать "схемы" ручкой на бумаге? Серьезно? Увидев первую схему, дальше читать не стал - если автор на столько не уважает читателя, то дальше мне здесь делать нечего.
|
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний