Конструктор Mini Bluetooth робо-платформа V3.0 від Keyestudio (вітрина)
код: KIB098
Архівний товар, який більше не продається у нашому магазині
Увы, за этот товар уже голосовать нельзя :(
НО!
У нас есть куча других классных товаров! :)
2
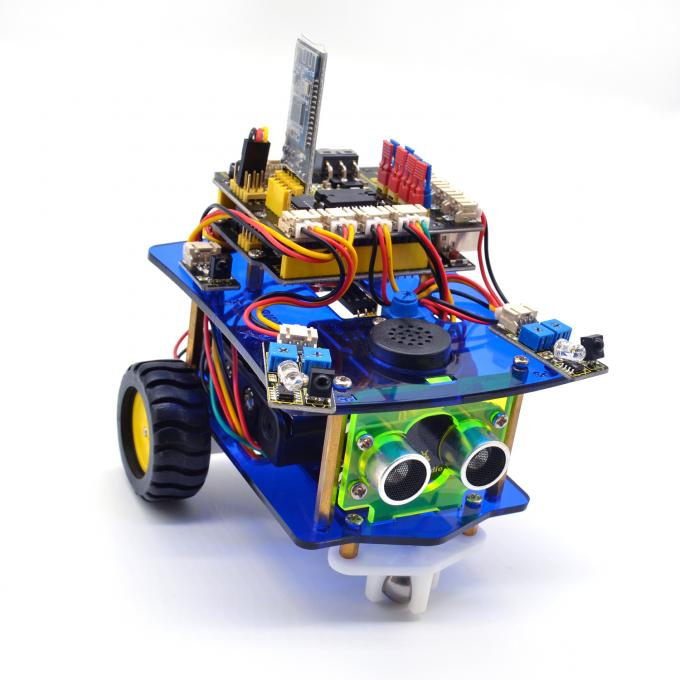
Новий, повністю функціональний товар, виставковий варіант з вітрини (без збирання). Представляємо настільну міні-Bluetooth мобільну робо-платформу Keyestudio V3.0 – оновлену версію настільної міні-Bluetooth робо-платформи Keyestudio V2.0. Розумний автомобіль як і раніше підтримує такі функції, як відстеження лінії, обхід перешкод, управління ІК пультом і Bluetooth і багато іншого. Набір містить все необхідне для побудови мобільного робо-платформи, керованої через Bluetooth або за допомогою інфрачервоного пульта.
Крім того, зроблена модернізація для поліпшення основних функцій:
Акрилові несучі палуби більш яскраві і барвисті;
Додавання звукового модуля для створення фантастичного звуку при русі автомобіля;
Використаний модуль Bluetooth HM-10, який може підтримувати Bluetooth 4.0 з підтримкою систем Android і iOS також може управляти автомобілем з власним Bluetooth-додатком.
Можна вибрати батарейний відсік 18650 або 4-елементний батарейний відсік AA для живлення автомобіля-робота. Зверніть увагу, що батареї та зарядний пристрій не включені в комплект платформи. Користувачі можуть вибирати один з двох варіантів живлення: дві 18650 батареї або чотири батарейки АА (1,5 В) для живлення автомобіля-робота.
Доробки на платі моторного приводу. Повзунковий перемикач для управління перемикачем живлення і додані 8 перемичок для керування напрямком двигуна постійного струму, що полегшує налагодження коду.
Кодування автомобіля-робота за допомогою програмного забезпечення для блоків Mixly, просте і готове до роботи.
Починаючи з базових і закінчуючи складними проектами, за допомогою цього набору Ви можете навчитися керувати автомобілем-роботом за допомогою кодування блоків Mixly.
Увага! У наборі використано оновлений шилд V2, який має кілька відмінностей від першої версії, а саме - змінено використання кількох пінів:
Замість D9 використано D6
Замість D6 використано D11
Замість D11 використано A0
Замість A0 використано D3
У прикладах програм необхідно змінити відповідні номери пінів на нові. Усі піни, виведені на роз'єми, підписані шовкографією на платі шилда.
Детально опис початку роботи, складання і програмування є по посиланню в кінці тексту.
Характеристики:
Контролер: Arduino UNO Rev3
Напруга живлення двигуна: 1-6В
Довжина валу двигуна: 10 мм
Швидкість обертання: при 6,0 В 100 об / хв.
Управління двигуном здійснюється за допомогою драйвера L298P
Три групи модулів відстеження ліній для виявлення чорно-білої лінії з високою точністю і можуть також використовуватися для захисту від падіння
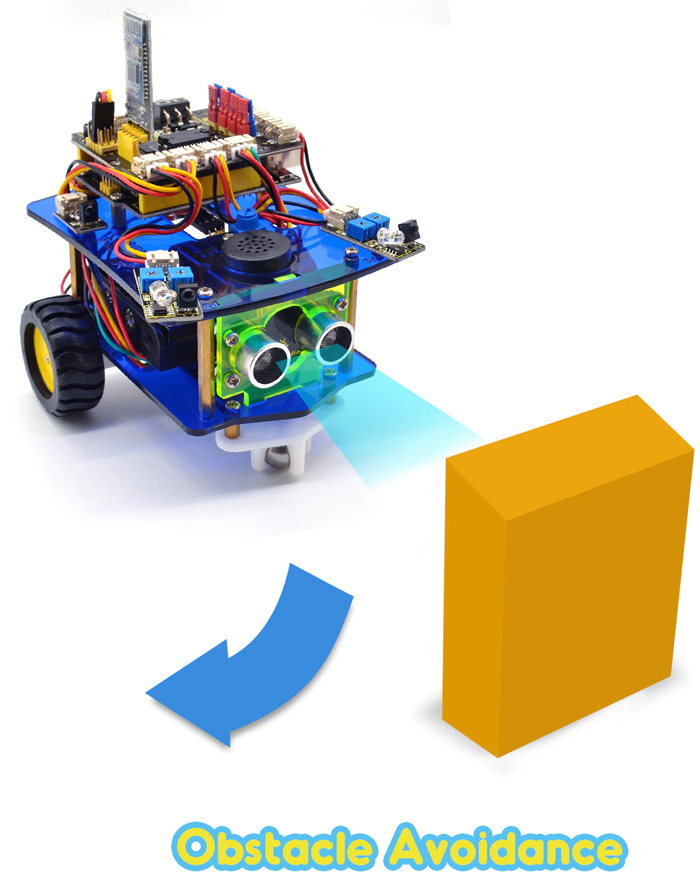
Дві групи модулів виявлення перешкод для визначення перешкоди по лівому і правому бортах машини
Ультразвуковий модуль використовується для визначення відстані між модулем і перешкодами
Бездротовий Bluetooth модуль може бути з'єднаний з Bluetooth на мобільному телефоні для віддаленого управління автомобілем;
Модуль інфрачервоного приймача з інфрачервоним пультом дистанційного керування для управління автомобілем;
Зовнішнє живлення: від 7 до 12 В.
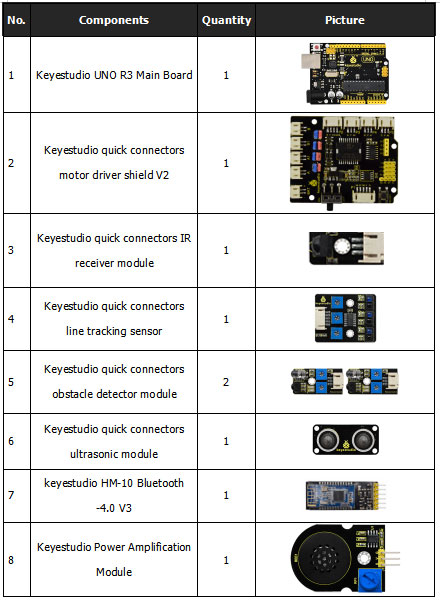
Комплектність набору:
Arduino UNO REV4 - 1
Основний шилд з роз'ємами підключення периферії і драйверами моторів - 1
Шилд підключення датчиків - 1
Модулі датчиків перешкод - 2
Ультразвуковий датчик - 1
Модуль Bluetooth 4.0 V3 HM-10 - 1
Модуль інфрачервоного приймача - 1
Інфрачервоний пульт управління JMFP-4 - 1
Модуль динаміка - 1
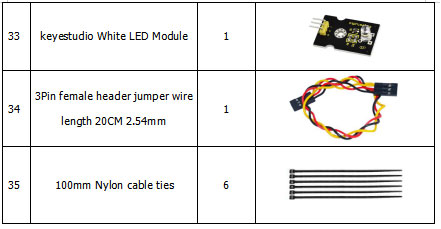
Модуль білого світлодіода - 1
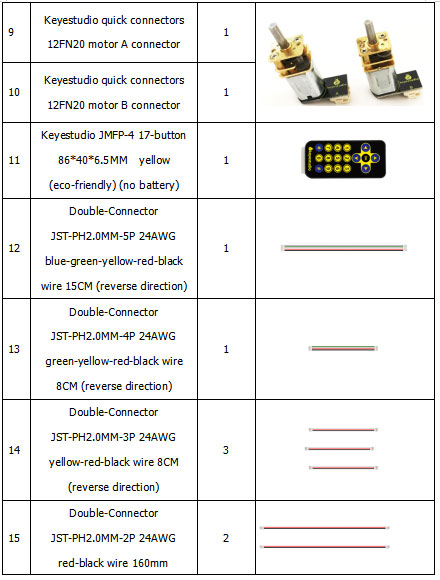
Два мотора 12FN20 - 2
Тримачі моторів N20 - 2
Тримач кульки-колеса з кулею (діаметр: 15мм) - 1
Колеса (діаметр: 43мм, ширина: 9мм) - 2
Шлейф JST-PH2.0MM-5P 24AWG 15см - 1
Шлейф JST-PH2.0MM-4P 24AWG 8см - 1
Шлейф JST-PH2.0MM-3P 24AWG 8см - 3
Шлейф JST-PH2.0MM-2P 24AWG 160мм - 2
Шлейф трьохконтактний 20см - 1
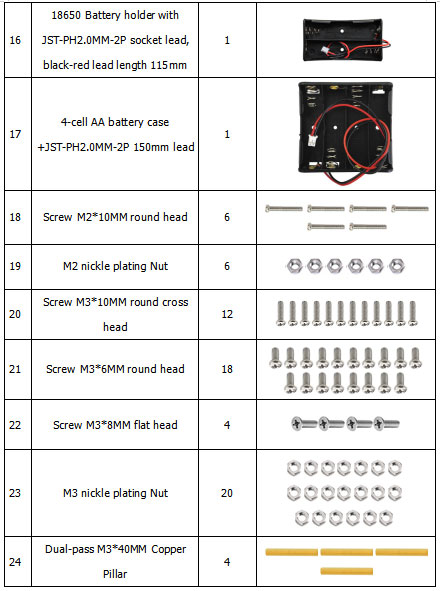
Батарейний відсік на 2х18650 - 1
Батарейний відсік на 4хАА - 1
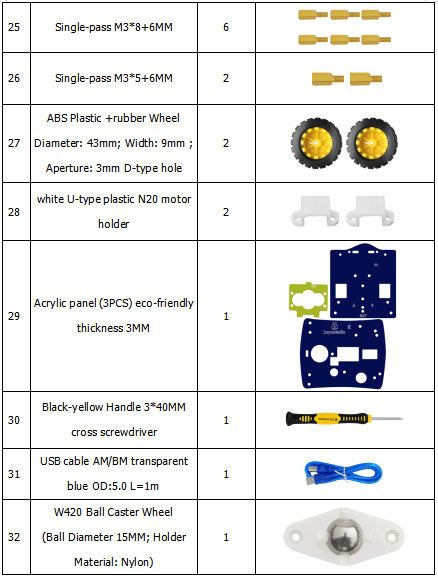
Гвинти М2 * 10мм - 6
Гвинти М3 * 10мм - 12
Гвинти М3 * 6мм - 18
Гвинти М3 * 8мм - 4
Гайки М2 - 6
Гайки М3 - 20
Стійки М3 * 40мм мама-мама - 4
Стійки М3 * 8 + 6мм мама-тато - 6
Стійки М3 * 5 + 6мм мама-тато - 2
Три основні деталі корпуса - 1комплект
Кабель підключення до комп'ютера - 1
Викрутка - 1
Стяжки - 6
Виявлення перешкод за допомогою інфрачервоного датчика
В ході експерименту ми встановили два інфрачервоних датчика ухилення від перешкод з лівого боку і з правого боку, щоб визначити наявність будь-яких перешкод.
Управління за допомогою мобільного додатку на смартфоні або за допомогою інфрачервоного пульта
Використовуючи додаток на телефоні і передачу даних через Bluetooth Ви можете управляти рухом Вашої машинки.
Режим руху по лінії
В ході цього експерименту машинка рухається по траєкторії, описаної лінією, визначаючи її трьома інфрачервоними датчиками, розташованими на дні машини. Контролер постійно сканує датчиками лінію і коригує рух таким чином, що б лінія постійно перебувала тільки під середнім датчиком.