Конструктор Mini Bluetooth робо-платформа V3.0 от Keyestudio (витрина)
код: KIB098
Архивный товар, который больше не продается в нашем магазине
Увы, за этот товар уже голосовать нельзя :(
НО!
У нас есть куча других классных товаров! :)
2
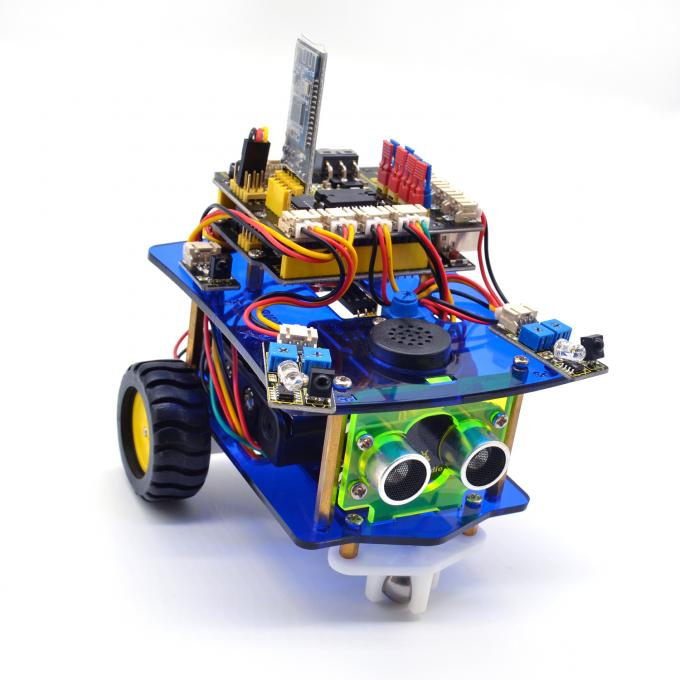
Новый, полностью функциональный товар, выставочный вариант с витрины (без сборки). Представляем настольную мини-Bluetooth мобильную робо-платформу Keyestudio V3.0 – обновленную версию настольной мини-Bluetooth робо-платформы Keyestudio V2.0. Умный автомобиль по-прежнему поддерживает такие функции, как отслеживание линии, обход препятствий, управление ИК пультом и Bluetooth и многое другое. Набор содержит все необходимое для построения мобильной робо-платформы, управляемой через Bluetooth или при помощи инфракрасного пульта.
Кроме того, сделана модернизация для улучшения основных функций:
Акриловые несущие палубы более яркие и красочные;
Добавление звукового модуля для создания фантастического звука при движении автомобиля;
Использован модуль Bluetooth HM-10, который может поддерживать Bluetooth 4.0 с поддержкой систем Android и iOS также может управлять автомобилем с собственным Bluetooth-приложением.
Можно выбрать батарейный отсек 18650 или 4-элементный батарейный отсек AA для питания автомобиля-робота. Обратите внимание, что батареи и зарядное устройство не включены в комплект платформы. Пользователи могут выбирать один из двух вариантов питания: две 18650 батареи или четыре батарейки АА (1,5 В) для питания автомобиля-робота.
Доработки на плате моторного привода. Ползунковый переключатель для управления переключателем питания и добавлены 8 перемычек для управления направлением двигателя постоянного тока, что облегчает отладку кода.
Кодирование автомобиля-робота с помощью программного обеспечения для блоков Mixly, простое и готовое к работе.
Начиная с базовых и заканчивая сложными проектами, с помощью этого набора Вы можете научиться управлять автомобилем-роботом с помощью кодирования блоков Mixly.
Внимание! В наборе использован обновлённый шилд V2, который имеет несколько отличий от первой версии, а именно - изменено использование нескольких пинов:
Вместо D9 использован D6
Вместо D6 использован D11
Вместо D11 использован A0
Вместо A0 использован D3
В примерах программ необходимо соответствующие номера пинов изменить на новые. Все пины, выведенные на разъёмы подписаны шелкографией на плате шилда.
Подробно описание начала работы, сборки и программирования есть по ссылке в конце текста.
Характеристики:
Контроллер: Arduino UNO Rev3
Напряжение питания двигателя: 1-6В
Длина вала двигателя: 10 мм
Скорость вращения: при 6,0 В 100 об / мин.
Управление двигателем осуществляется с помощью драйвера L298P
Три группы модулей отслеживания линий для обнаружения черно-белой линии с высокой точностью и могут также использоваться для защиты от падения
Две группы модулей обнаружения препятствий для определения препятствия по левому и правому бортам машины
Ультразвуковой модуль используется для определения расстояния между модулем и препятствиями
Беспроводной Bluetooth модуль может быть соединен с Bluetooth на мобильном телефоне для удаленного управления автомобилем;
Модуль инфракрасного приемника с инфракрасным пультом дистанционного управления для управления автомобилем;
Внешнее питание: от 7 до 12 В.
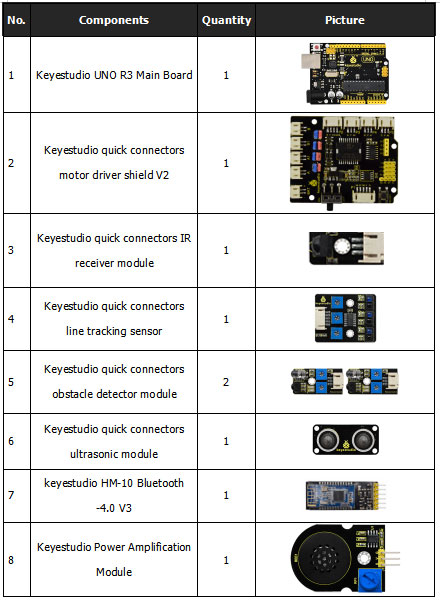
Комплектность набора:
Arduino UNO REV4 - 1
Основной шилд с разъемами подключения периферии и драйверами моторов - 1
Шилд подключения датчиков - 1
Модули датчиков препятствий - 2
Ультразвуковой датчик - 1
Модуль Bluetooth 4.0 V3 HM-10 - 1
Модуль инфракрасного приемника - 1
Инфракрасный пульт управления JMFP-4 - 1
Модуль динамика - 1
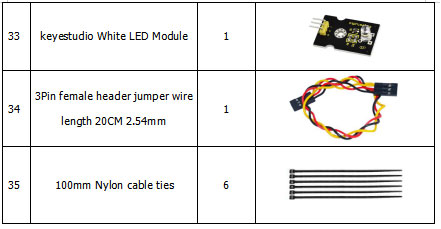
Модуль белого светодиода - 1
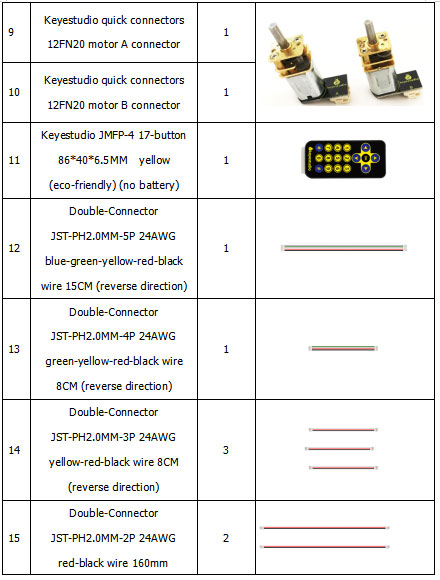
Два мотора 12FN20 - 2
Держатели моторов N20 - 2
Держатель шарика-колеса с шаром (диаметр: 15мм) - 1
Колеса (диаметр: 43мм, ширина: 9мм) - 2
Шлейф JST-PH2.0MM-5P 24AWG 15см - 1
Шлейф JST-PH2.0MM-4P 24AWG 8см - 1
Шлейф JST-PH2.0MM-3P 24AWG 8см - 3
Шлейф JST-PH2.0MM-2P 24AWG 160мм - 2
Шлейф трехконтактный 20см - 1
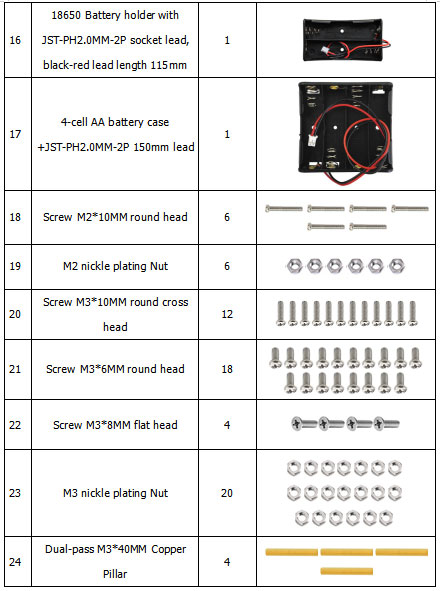
Батарейный отсек на 2х18650 - 1
Батарейный отсек на 4хАА - 1
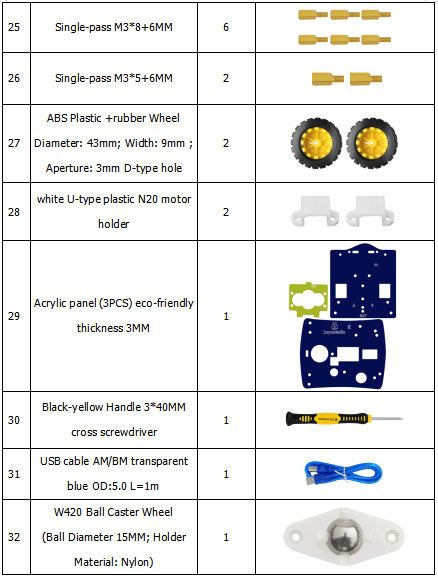
Винты М2*10мм - 6
Винты М3*10мм - 12
Винты М3*6мм - 18
Винты М3*8мм - 4
Гайки М2 - 6
Гайки М3 - 20
Стойки М3*40мм мама-мама - 4
Стойки М3*8+6мм мама-папа - 6
Стойки М3*5+6мм мама-папа - 2
Три основные детали корпуса - 1комплект
Кабель подключения к компьютеру - 1
Отвертка - 1
Стяжки - 6
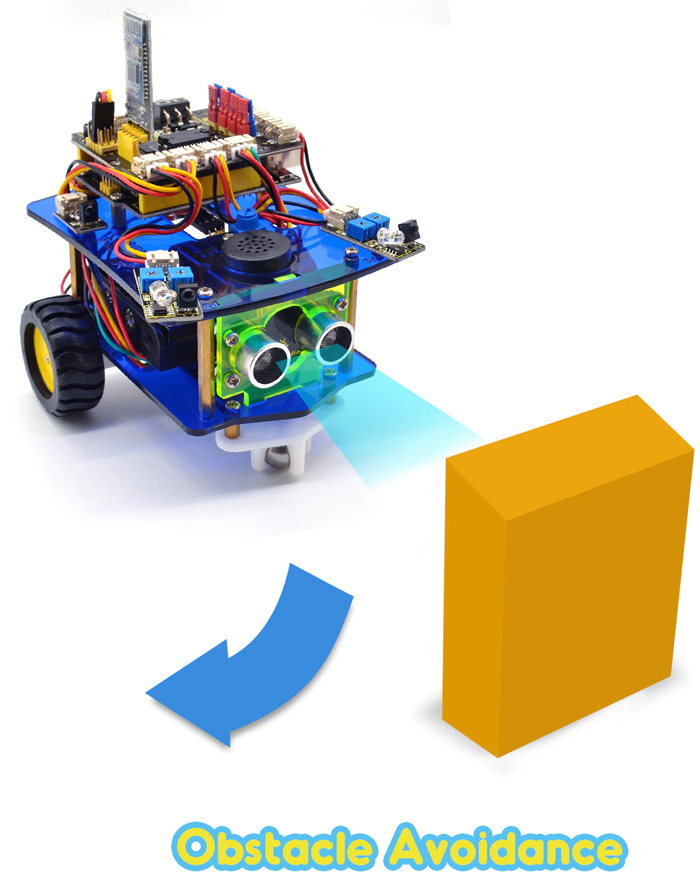
Обнаружение препятствий при помощи инфракрасного датчика
В ходе эксперимента мы установили два инфракрасных датчика уклонения от препятствий с левой стороны и с правой стороны, чтобы определить наличие каких-либо препятствий.
Управление при помощи мобильного приложения на смартфоне или с помощью инфракрасного пульта
Используя приложение на телефоне и передачу данных через Bluetooth Вы можете управлять движением Вашей машинки.
Режим движения по линии
В ходе этого эксперимента машинка движется по траектории, описанной линией, определяя её тремя инфракрасными датчиками, расположенными на днище машинки. Контроллер постоянно сканирует датчиками линию и корректирует движение таким образом, что бы линия постоянно находилась только под средним датчиком.