Архівний товар, який більше не продається у нашому магазині
Увы, за этот товар уже голосовать нельзя :(
НО!
У нас есть куча других классных товаров! :)
1
TMC2130 V1.1 – унікальний драйвер крокового двигуна. Відрізняється широкими можливостями конфігурації і якістю. Драйвер призначений для безшумної і плавної роботи крокових двигунів завдяки інтерполяції мікрокроків - microPlyer. За допомогою цієї технології, якщо процесор просить TMC2130 зробити один мікрокрок, то драйвер робить 16 інтерпольованих мікрокроків. Таким чином, драйвер може зробити до 256 мікрокроків (16 * 16) і в основного мікроконтролера немає необхідності в додатковому обчисленні всіх 256 мікрокроків - драйвер зробить це сам.
Мікросхема драйвера вимагає обов'язкового примусового охолодження, особливо при максимальних значеннях струму через обмотки двигуна.
Розрахунок струму двигуна від напруги на змінному резисторі:
Irms = (Vref * 1.77A) / 2.5V
Irms = Vref * 0.71
Imax = 1.41 * Irms
Vref = (Irms * 2.5V) / 1.77A
Vref = Irms * 1.41
Vref = Imax
Де:
Vref - опорна напруга на змінному резисторі
Irms - Усереднений струм двигуна
Imax - Максимальний струм двигуна
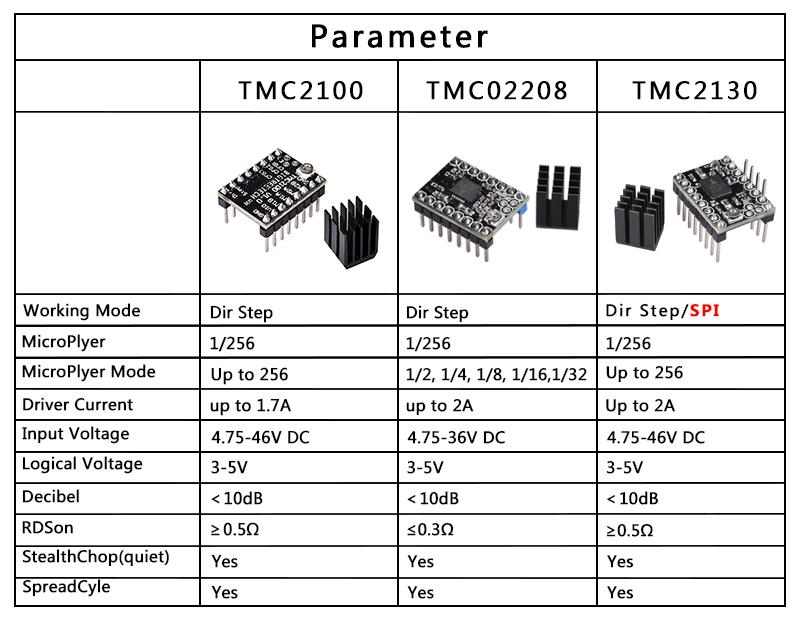
Порівняльна таблиця драйверів:
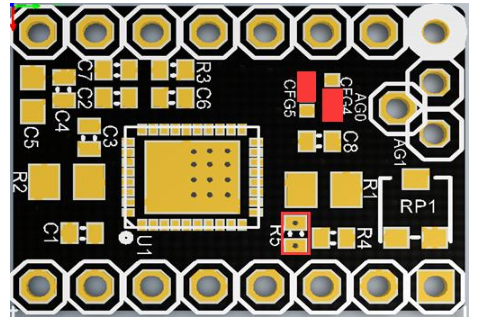
Оптимально для режиму StealthChop:
CFG0 - не важливо
CFG1, CFG2 - відкрито, відкрито для 1/16 і Vcc, відкрито для 1/4. Другий режим кращий.
CFG3 - відкрито (в даному модулі не використовується)
CFG4 - не важливо
CFG5 - земля (права перемичка)
CFG6 - замкнуто
Переведення драйвера в SPI режим роботи (комутація перемичок на платі):