|
Каталог
|
Уникальный драйвер шагового двигателя TMC2130 V3.0. Отличается широкими возможностями конфигурирования и качеством. Драйвер предназначен для бесшумной и плавной работы шаговых двигателей благодаря интерполяции микрошагов – microPlyer. С помощью этой технологии, если процессор просит TMC2130 сделать один микрошаг, то драйвер делает 16 интерполированных микрошагов. Таким образом, драйвер может сделать до 256 микрошагов (16*16) и основному микроконтроллеру нет необходимости в дополнительном вычислении всех 256 микрошагов – драйвер сделает это сам. Микросхема драйвера требует обязательного принудительного охлаждения, особенно при максимальных значениях тока через обмотки двигателя. Рассчет тока двигателя от напряжения переменного резистора:
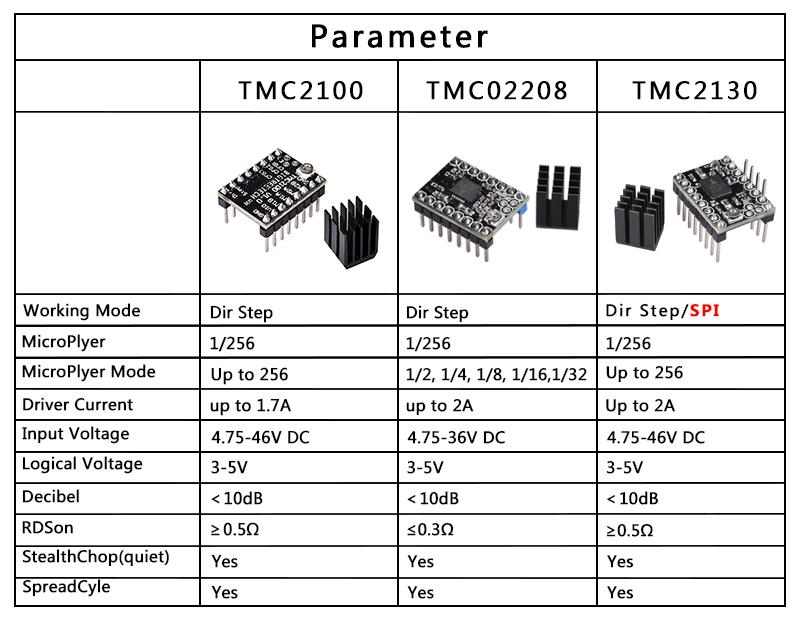
Сравнительная таблица драйверов:
Оптимальные для режима StealthChop:
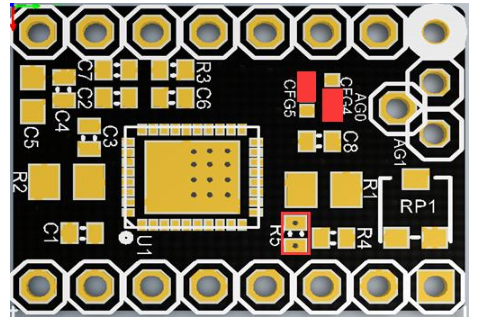
Перевод драйвера в SPI режим работы (коммутация перемычек на плате):
Характеристики:
Ссылки: |
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной