|
Каталог
|
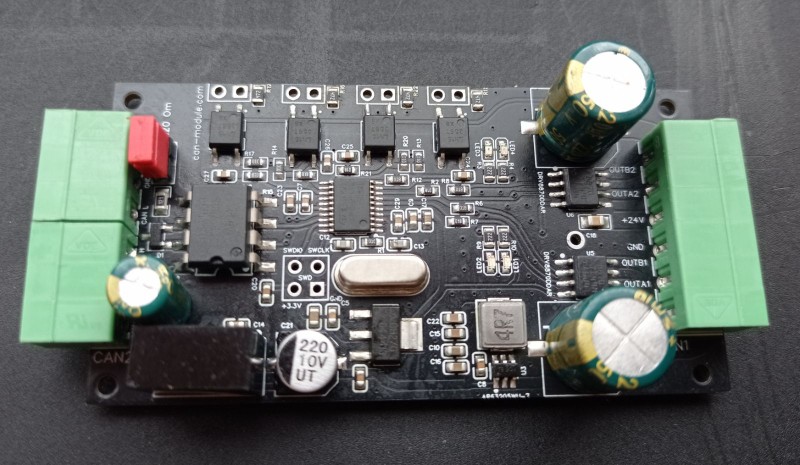
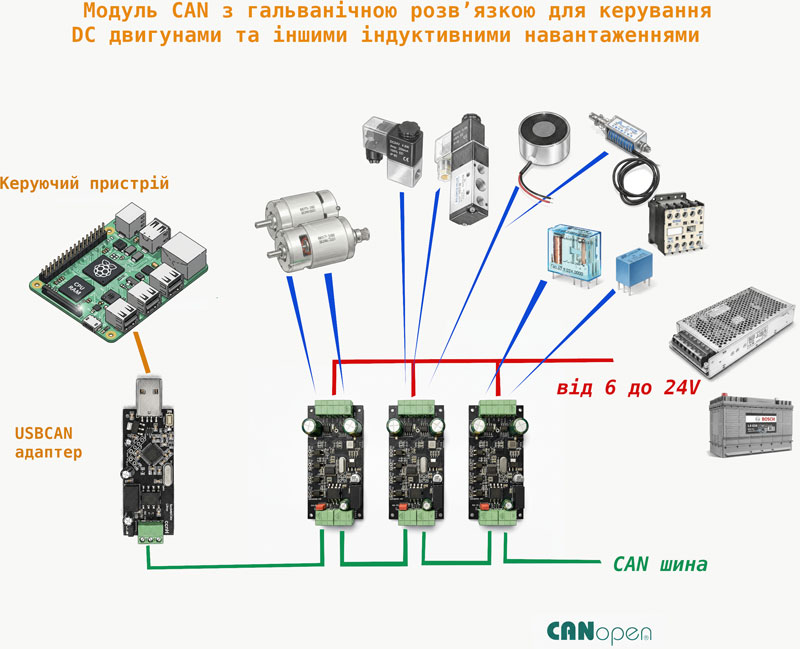
Адаптер працює в широкому діапазоні напруги живлення від 6 до 24 В, що дозволяє його використовувати з різними джерелами живлення, включаючи акумулятори та блоки живлення. Максимальний струм 3.5 А на кожен двигун за умови належного охолодження забезпечує достатню потужність для більшості стандартних застосувань. Для оптимальної роботи рекомендується забезпечити природну або примусову вентиляцію, особливо при тривалому навантаженні. Цей адаптер ідеально підходить для робототехніки, промислових систем, а також DIY-проектів, де потрібне точне керування двома DC-моторами. Інтеграція з CAN-шиною дозволяє використовувати його в розподілених системах із високою надійністю зв’язку. Налаштування та ідентифікація За замовчуванням адаптер має ідентифікатор (ID) 0x08, але його можна змінити через SDO-команду (0x2005 [sub 0]), що дозволяє інтеграцію кількох пристроїв у єдину CAN-мережу без конфліктів. При старті адаптер автоматично надсилає повідомлення 0x0700 + ID, сигналізуючи про перехід у робочий режим (Operational), що спрощує діагностику підключення. Управління двигунами Управління обертанням двигунів здійснюється через прості бітові команди (1 байт) 0b0000 00 00 : 00 — двигун вимкнений (можлива інерційна зупинка). 01 — обертання вліво. 10 — обертання праворуч. 11 — швидка зупинка (застосування +VDD на обидва дроти). Швидкість обертання регулюється PWM-сигналом із частотою 2 кГц і роздільною здатністю 0.5% (діапазон 0–200). Для зручності скорочені команди дозволяють задавати швидкість одним байтом (0–0xC8), що оптимізує трафік у мережі CAN. Для швидкої зупинки двигунів (команда 11) рекомендується встановити PWM на 100% (0xC8), щоб уникнути пошкодження електроніки через різке переривання струму. Приклад відправки команд RxPDO1 = 0x200 - перший двигун RxPDO2 = 0x300 - другий двигун PWM = 0 ... 200 (0xC8)
* якщо використовується діапозон за замовчуванням до 200 [0xC8], то достатньо одного байта. Пристрій оснащений 4 кінцевими вимикачами, стан яких відстежується в реальному часі. Будь-яка зміна стану (замикання/розмикання) викликає відправку повідомлення TxPDO1 (0x180 + ID) із поточним станом усіх вимикачів у бітиовій масці. Наприклад, значення 0x0E вказує на замикання першого вимикача, що може бути використано для автоматичного обмеження ходу механізму. Приклад: 188[1] 0x0F (0b00001111) – стан, коли всі кінцевики розімкнені 188[1] 0x0E (0b00001110) – перший кінцевик замкнений SDO-команди та налаштування: SDO-інтерфейс надає гнучкість для конфігурації адаптера:
Практичні поради: Якщо під час звернення до сервера SDO виникли помилки, він повертає код помилки: 580+ id[8] 80 + index (2байта) + subindex (1байт) + error (4 байта) Після збереження або відновлення до стандартних установок потрібно подати команду NMT на скидання адаптера, щоб зміни набули чинності. 000 [2] 81 id Інші команди NMT 000 [2] 01 id перейти в режим Operational - це робочий режим адаптера, увімкнено після старту адаптера 000 [2] 80 id перейти в режим Enter Pre-Operational - режим налаштувань, при цьому двигун не працює. Якими приладами можна керувати:
Відгуки покупців про Модуль CAN з гальванічною розв’язкою для керування DC двигунами та іншими індуктивними навантаженнями поки немає жодного відгуку - станьте першим!
Написати відгук: Є питання по "Модуль CAN з гальванічною розв’язкою для керування DC двигунами та іншими індуктивними навантаженнями" ?
Шановні друзі! Ми намагаємося тримати на сайті інформацію про наявність товарів та ціни на них в актуальному стані. Коригування відбуваються постійно. Якщо ви знаходите ціну на товар завищеною, напишіть нам про це із посиланням на товар. Ми розглянемо лист та чи обгрунтуємо ціну, чи підкоригуємо її. Асортимент магазину дуже великий та іноді бувають помилки в ціноутворенні, особливо при скачках курсу долара. Дякуємо за розуміння.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний