|
Каталог
|
Arduino, MPU-6050 и 2 сервопривода2016-02-26 Всі статті →Автор Андрей Чепурко chepurko-99@mail.ru В этом уроке мы будем управлять вращением сервоприводов с помощью акселерометра на датчике MPU-6050.
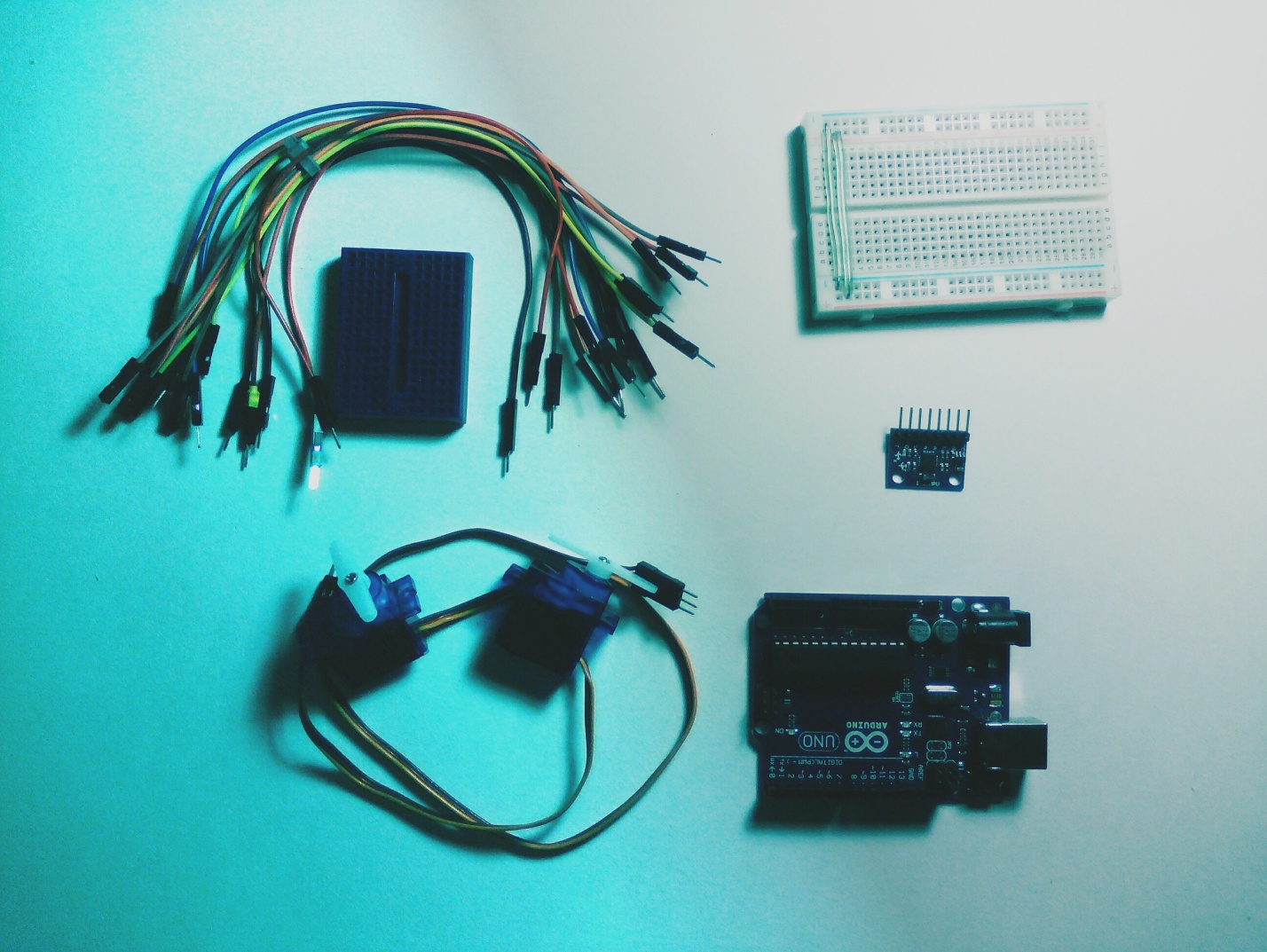
Для этого мини-проекта нам понадобятся:
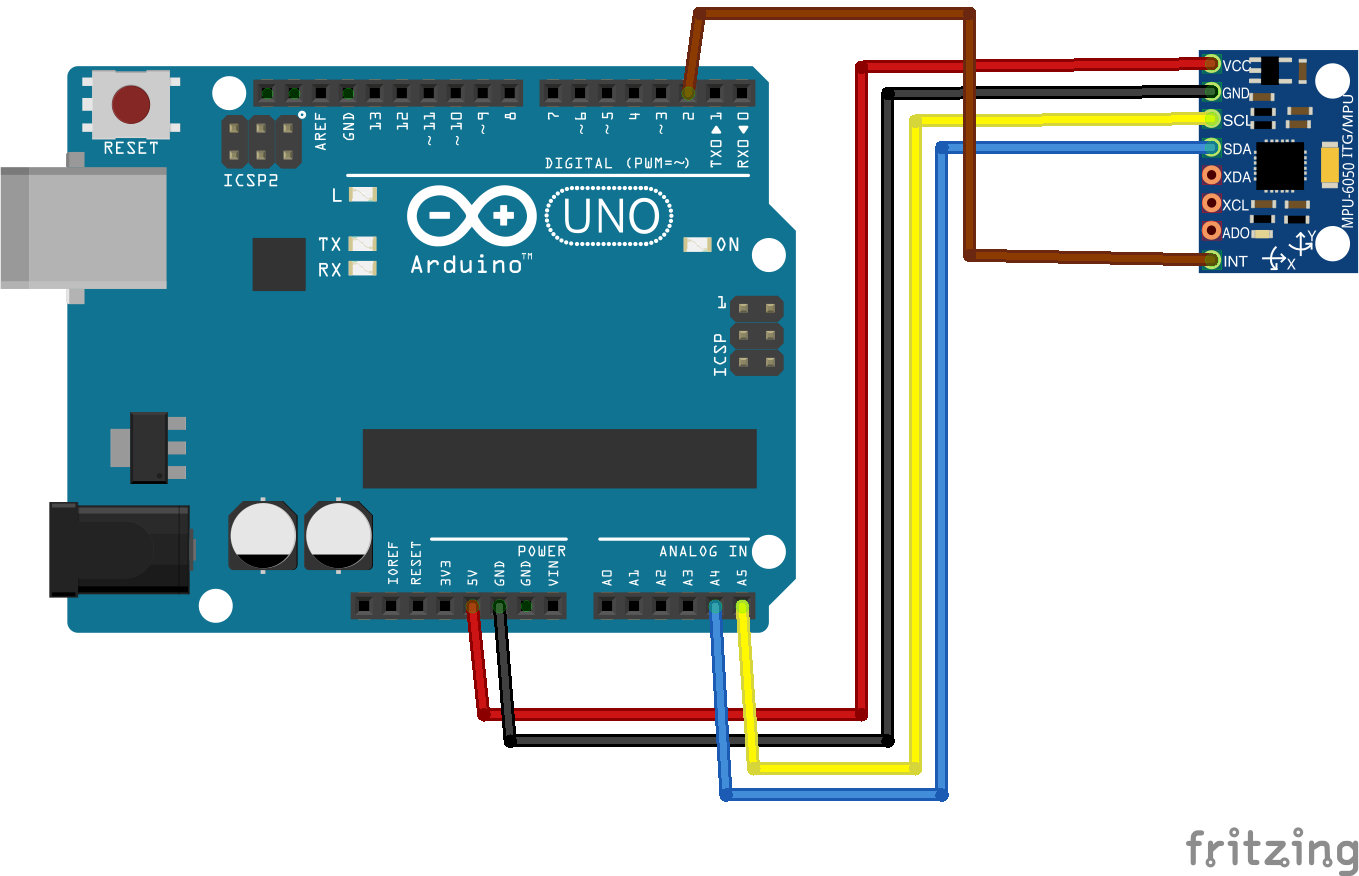
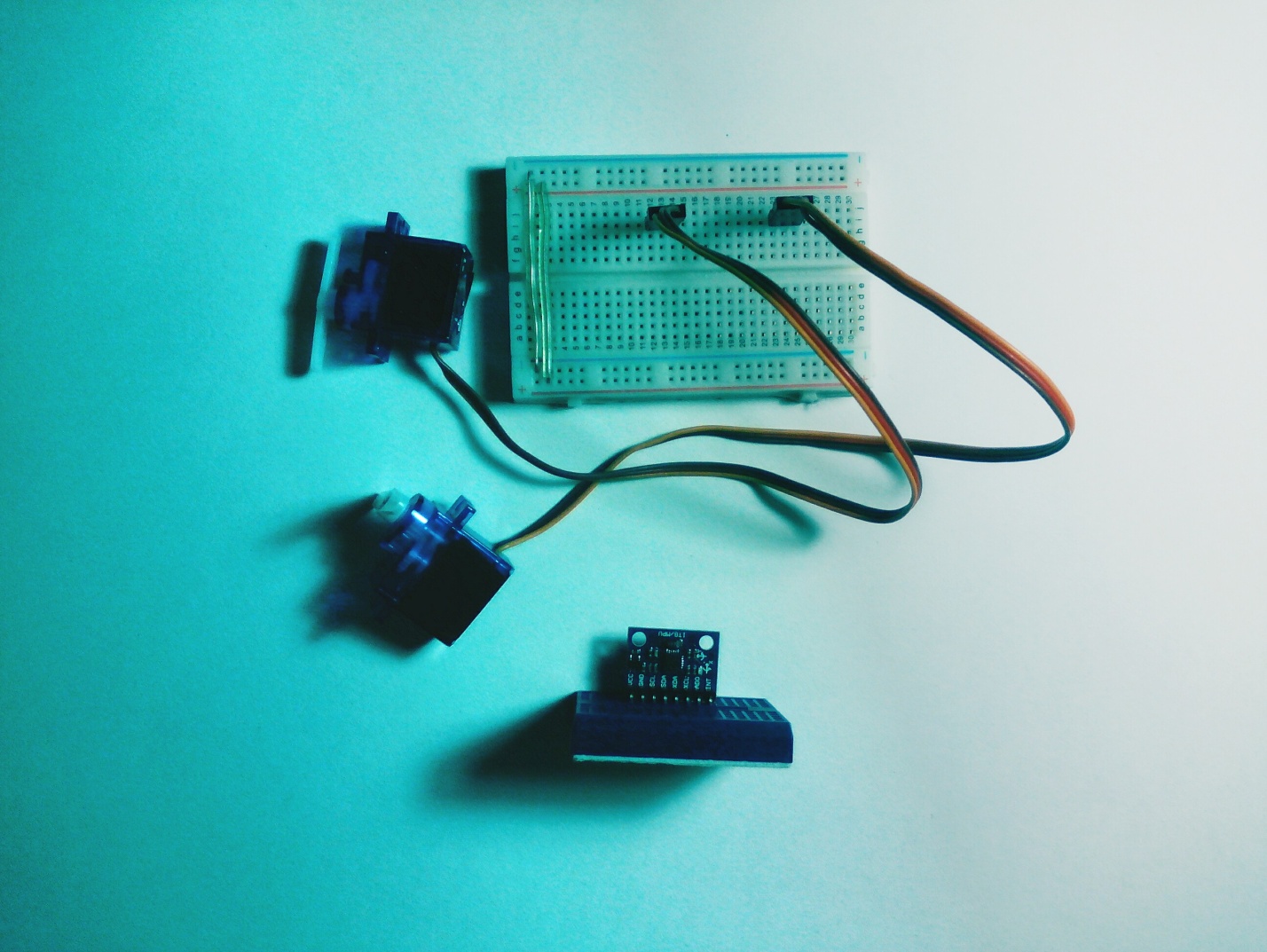
Сначала давайте разберемся с принципом работы всего “механизма”: мы будем получать данные наклона по осям X и Y с датчика и переводить их в угол сервопривода. Как видите, все довольно-таки просто. Давайте же приступим к реализации проекта! Схема подключения датчика MPU-6050 к Ардуино выглядит следующим образом:
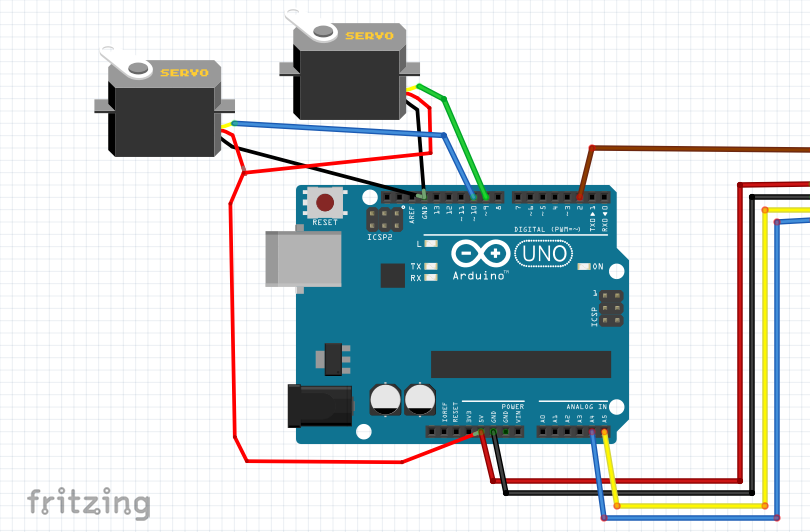
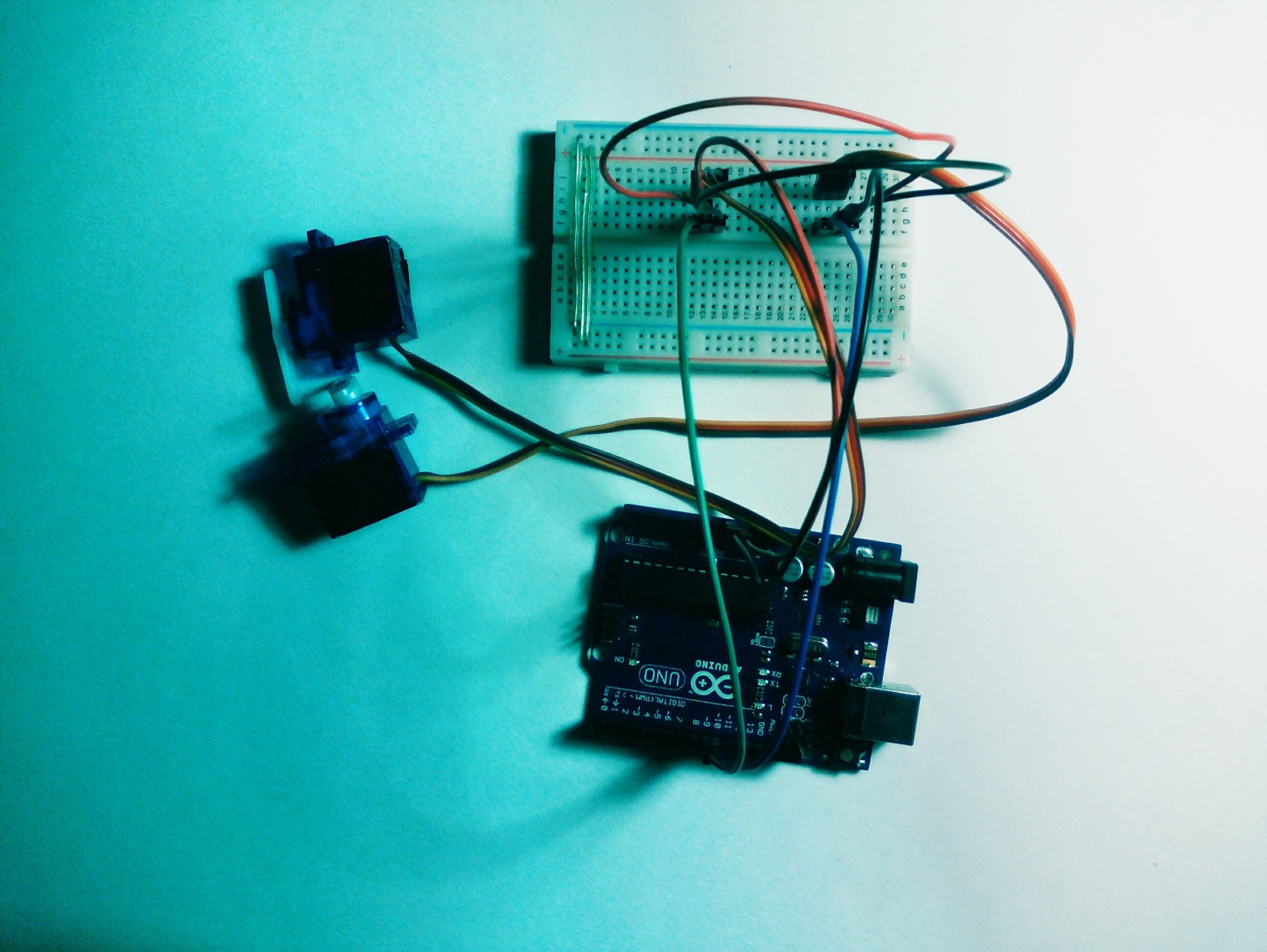
Далее подключаем сервоприводы:
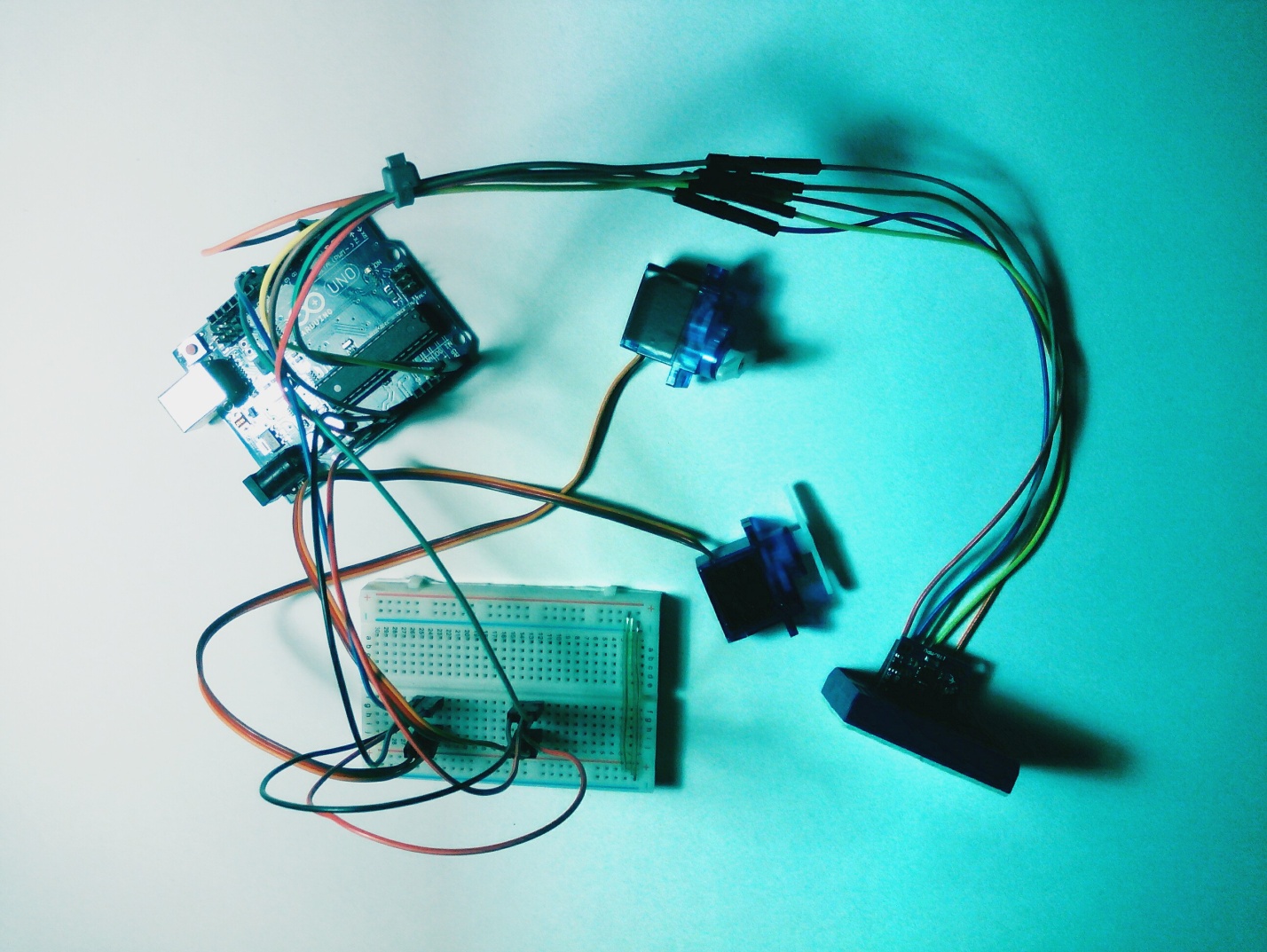
Один серво к пину №9, второй к пину №10. Ниже представлены шаги сборки:
Вот и закончили мы со сборкой. Теперь осталось написать скетч, залить его на плату и готово!
При наклоне по оси Y, будет вращаться один сервопривод. По оси Х – второй. Надеемся, этот урок был полезным для вас. Спасибо за внимание и до скорых встреч!
А вот еще одно интересное видео, с практическим применением связки акселерометр+серво:
Загальна оцінка:

Оцінка
"Arduino, MPU-6050 и 2 сервопривода"
зроблена на основі 2 оцінок 2 клієнтських відгуків. Дякуємо Вам за звернення! Ваш відгук з'явиться після модерації адміністратором.
Єгор
06.03.2024 12:37:11

Все працює
Александр
22.07.2018 14:56:25

А почему не наботает два сервопривода по гироскопу они только выкручиваются по максимуму в одну позицыю и не подчиняются гироскопу, залит именно ваш скечь. Может там ошибка?
|
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний