|
Каталог
|
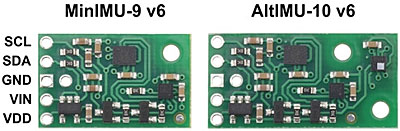
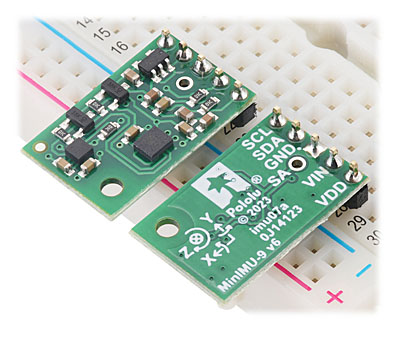
MinIMU-9 v6 - це інерційний вимірювальний блок (IMU), який поєднує 3-осьовий гіроскоп LSM6DSO, 3-осьовий акселерометр та 3-осьовий магнітометр LIS3MDL на мініатюрній платі розміром 20.32 х 12.7 мм. Інтерфейс I²C забезпечує доступ до дев'яти незалежних вимірювань обертання, прискорення та магнітного поля, які можна використовувати для розрахунку абсолютної орієнтації датчика. Плата MinIMU-9 v6 включає стабілізатор напруги і схему перетворення рівня, що дозволяють працювати в діапазоні напруг від 2.5 В до 5.5 В, а відстань між контактами 2.54 мм спрощує використання зі стандартними безпаєчними макетними платами і перфорованими платами з кроком отворів 5. Код виробника: 2862 У порівнянні з попередньою версією MinIMU-9 v5, у версії v6 акселерометр/гіроскоп MEMS LSM6DS33 замінений на новий LSM6DSO, який пропонує ряд поліпшень, таких як нижчий рівень шуму і більш висока максимальна швидкість передачі даних для гіроскопа. MinIMU-9 v6 повинен бути прямою заміною для MinIMU-9 v5 у багатьох додатках; в інших випадках можуть знадобитися зміни у програмному забезпеченні. Модуль MinIMU-9 v6 також сумісний за висновками з AltIMU-10 v6, який пропонує ту ж функціональність, доповнену цифровим барометром, що дозволяє отримувати дані про тиск та висоту. AltIMU має другий монтажний отвір і на 5.08 мм довший, ніж MinIMU. Будь-який код, написаний MinIMU-9 v6, повинен також працювати з AltIMU-10 v6.
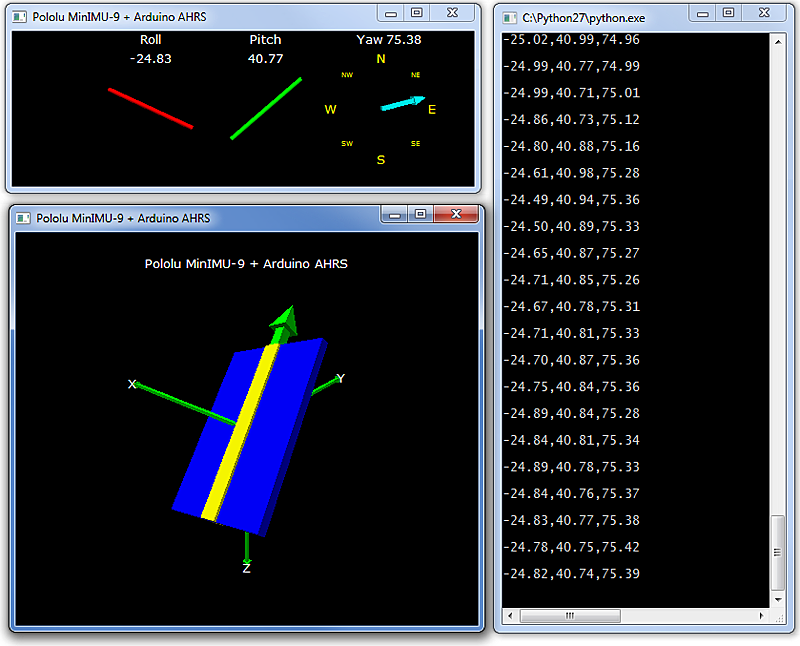
Мікросхеми LSM6DSO і LIS3MDL мають безліч параметрів, що настроюються, включаючи динамічно вибирану чутливість для гіроскопа, акселерометра і магнітометра. Для кожного датчика передбачено також вибір швидкості передачі даних. Доступ до обох мікросхем здійснюється через загальний інтерфейс I²C/TWI, що дозволяє адресувати датчики індивідуально по одній тактовій та одній лінії даних. Крім того, виведення конфігурації адреси веденого пристрою дозволяє користувачам змінювати I²C-адреси датчиків і підключати два MinIMU до однієї шини I²C. (Додаткову інформацію див. нижче.) Дев'ять незалежних показань обертання, прискорення та магнітного поля (іноді званих 9 ступенями свободи) надають усі дані, необхідні для створення системи відліку положення та курсу (AHRS). За допомогою відповідного алгоритму мікроконтролер або комп'ютер можуть використовувати дані для розрахунку орієнтації плати MinIMU. Гіроскоп може використовуватися для точного відстеження обертання в короткі проміжки часу, в той час як акселерометр і компас можуть допомогти компенсувати дрейф гіроскопа з часом, надаючи абсолютну систему відліку. Відповідні осі двох мікросхем вирівняні на платі для полегшення цих обчислень злиття даних датчиків. (Приклад такої системи з використанням Arduino див. на малюнку нижче та у розділі «Приклад коду» нижче.) Візуалізація орієнтації AHRS, розрахованої на основі показань MinIMU-9:
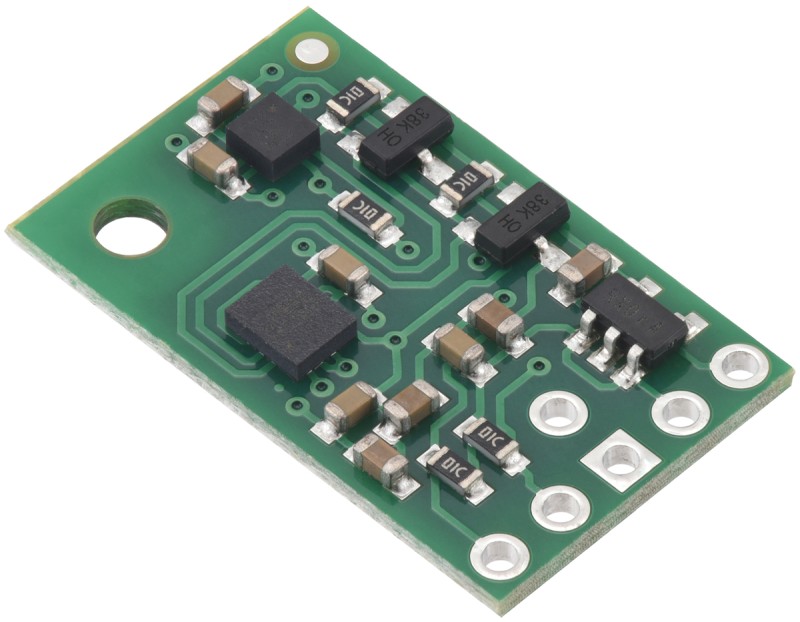
Плата-носій включає лінійний стабілізатор напруги з низьким падінням напруги, що забезпечує напругу 3.3 В, необхідні для LSM6DSO і LIS3MDL, що дозволяє живити модуль від одного джерела живлення напругою від 2.5 В до 5.5 В. Вихід стабілізатора доступний на виведенні VDD і може подавати майже 15. Плата-адаптер також включає схему, яка зрушує тактовий сигнал і дані ліній I²C до того ж рівня логічного напруги, що і VIN, що подається, що спрощує підключення плати до 5-вольтовим системам. Відстань між контактами на платі становить 2.54 мм, що спрощує її використання зі стандартними макетними безпайковими платами і перфорованими платами з кроком отворів 2.54 мм. Характеристики:
Позначення:
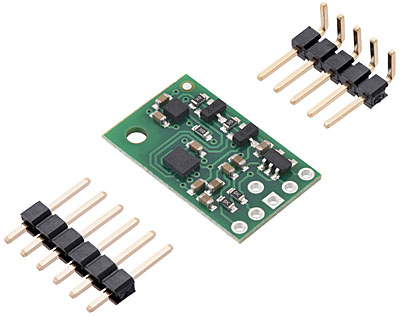
Комплектація: У комплект поставки входять: смужка з 1×6 штиркових роз'ємів з кроком контактів 2.54 мм та смужка з 1×5 кутових штиркових роз'ємів з кроком контактів 2.54 мм, як показано на малюнку нижче. Ви можете припаяти до плати обрану вами смужку роз'ємів для використання з нестандартними кабелями або безпайковими макетними платами, або припаяти дроти безпосередньо до самої плати для більш компактної установки. Плата має два монтажні отвори, які підходять для гвинтів №2 або M2 (не входять до комплекту).
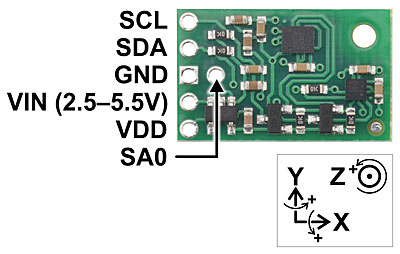
Використання MinIMU-9 v6: Підключення: Для використання MinIMU-9 v6 необхідно як мінімум чотири контакти: VIN, GND, SCL та SDA. VIN слід підключити до джерела напруги від 2.5 до 5.5 В, GND - до 0 В, а SCL і SDA - до шини I²C, що працює на тому ж логічному рівні, що і VIN. (В якості альтернативи, якщо ви використовуєте плату з системою 3.3, ви можете залишити VIN вимкненим і обійти вбудований стабілізатор, підключивши 3.3 безпосередньо до VDD.)
Контакти CS, готовність даних та переривання мікросхем LSM6DO та LIS3MDL недоступні на платі MinIMU-9 v6. Зокрема відсутність контакту CS означає, що додатковий інтерфейс SPI цих мікросхем недоступний. Якщо вам потрібні ці функції, розгляньте можливість використання інших плат-носіїв LSM6DSO та LIS3MDL.
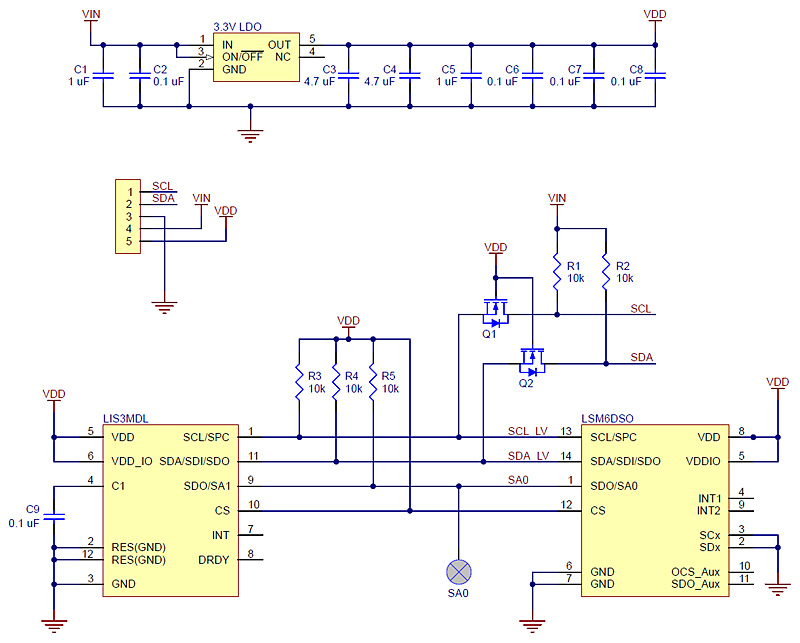
Наведена вище схема показує додаткові компоненти, які використовуються на платі-носії для спрощення роботи LSM6DSO і LIS3MDL, включаючи стабілізатор напруги, що дозволяє живити плату від одного джерела напруги від 2.5 до 5.5 В, і схему перетворення рівнів, що забезпечує зв'язок по I²C на тому ж рівні лог. Ця схема також доступна для завантаження у форматі PDF. I²C-інтерфейс: Гіроскоп та акселерометр LSM6DSO, а також магнітометр LIS3MDL можуть бути підключені та налаштовані через шину I²C. Кожен із трьох датчиків працює як ведений пристрій на тій же шині I²C (тобто їх тактові та інформаційні лінії з'єднані разом для спрощення зв'язку). Крім того, перетворювачі рівнів на тактовій (SCL) та інформаційній (SDA) лініях I²C дозволяють здійснювати зв'язок по I²C з мікроконтролерами, що працюють при тій же напрузі, що і VIN (від 2.5 до 5.5 В). Детальний опис протоколів, що використовуються кожним пристроєм, можна знайти в технічному описі LSM6DSO та LIS3MDL. Більш детальна інформація про I²C загалом міститься у специфікації шини I²C від NXP. Мікросхеми LSM6DSO та LIS3MDL мають окремі адреси ведених пристроїв на шині I²C. Плата з'єднує висновки вибору адреси веденого пристрою (SA0 або SA1) обох мікросхем і замикає їх на VDD напругу через резистор 10 кОм. Ви можете встановити низький рівень на виведенні SA0 для зміни адреси керованого пристрою. Це дозволяє підключити два MinIMU (або MinIMU v6 та AltIMU v6) до однієї шини I²C. У наступній таблиці показані адреси відомих пристроїв датчиків:
Обидва чіпи MinIMU-9 v6 сумісні як зі стандартами I²C в швидкому режимі (400 кГц), так і в звичайному режимі. Приклад коду: Розроблено базову бібліотеку LSM6 для Arduino та бібліотеку LIS3MDL для Arduino , які спрощують взаємодію MinIMU-9 v6 з платою, сумісною з Arduino, наприклад, A-Star . Вони також спрощують налаштування датчиків та зчитування необроблених даних гіроскопа, акселерометра та магнітометра. Для демонстрації можливостей використання цих даних, ви можете перетворити Arduino, підключений до MinIMU-9 v6, систему визначення положення і курсу (AHRS) за допомогою цієї програми для Arduino . Вона використовує дані з MinIMU-9 для розрахунку оціночних кутів крену, тангажу та нишпорення, а результати роботи AHRS можна візуалізувати за допомогою програми 3D-тестування на вашому ПК (як показано на скріншоті вище). Це програмне забезпечення засноване на роботах Жорді Муньоса, Вільяма Премерлані, Хосе Хуліо та Дуга Вайбеля. Поради щодо протоколу підключення: У технічних описах міститься вся необхідна інформація для використання датчиків MinIMU-9 v6, але пошук важливих деталей може зайняти деякий час. Ось кілька порад щодо взаємодії та налаштування LSM6DSO та LIS3MDL, які, як ми сподіваємося, допоможуть вам швидше розпочати роботу: Гіроскоп, акселерометр та магнітометр за замовчуванням перебувають у режимі зниженого енергоспоживання. Для їх увімкнення необхідно встановити відповідні регістри конфігурації. За допомогою однієї команди I²C можна зчитувати або записувати дані в кілька регістрів LIS3MDL, активувавши старший біт адреси регістру для включення автоматичного збільшення адреси. Адреса регістру в LSM6DSO автоматично збільшується при багатобайтовому доступі, що дозволяє зчитувати або записувати дані в кілька регістрів за одну команду I²C. На відміну від деяких інших датчиків ST, автоматичне збільшення включено за замовчуванням; його можна вимкнути за допомогою поля IF_INC у регістрі CTRL3_C. На додаток до технічних описів, компанія ST надає примітки щодо застосування для LSM6DSO та LIS3MDL, що містять додаткову інформацію та рекомендації щодо їх використання. Посилання:
Відгуки покупців про Модуль Pololu MinIMU-9 v6 гироскоп, акселерометр и компас (LSM6DSO and LIS3MDL) поки немає жодного відгуку - станьте першим!
Написати відгук: Є питання по "Модуль Pololu MinIMU-9 v6 гироскоп, акселерометр та компас (LSM6DSO and LIS3MDL)" ?
Шановні друзі! Ми намагаємося тримати на сайті інформацію про наявність товарів та ціни на них в актуальному стані. Коригування відбуваються постійно. Якщо ви знаходите ціну на товар завищеною, напишіть нам про це із посиланням на товар. Ми розглянемо лист та чи обгрунтуємо ціну, чи підкоригуємо її. Асортимент магазину дуже великий та іноді бувають помилки в ціноутворенні, особливо при скачках курсу долара. Дякуємо за розуміння.
|
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний

")
")
")
")