|
Каталог
|
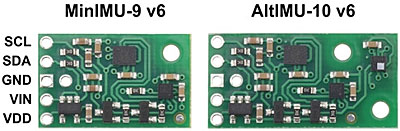
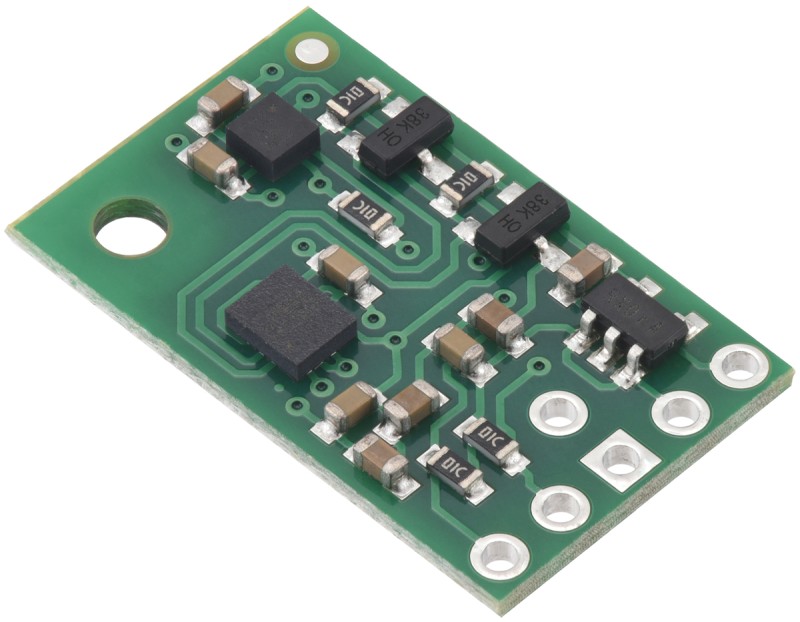
MinIMU-9 v6 - это инерциальный измерительный блок (IMU), который объединяет 3-осевой гироскоп LSM6DSO, 3-осевой акселерометр и 3-осевой магнитометр LIS3MDL на миниатюрной плате размером 20.32 х 12.7 мм. Интерфейс I²C обеспечивает доступ к девяти независимым измерениям вращения, ускорения и магнитного поля, которые можно использовать для расчета абсолютной ориентации датчика. Плата MinIMU-9 v6 включает в себя стабилизатор напряжения и схему преобразования уровня, позволяющие работать в диапазоне напряжений от 2.5 В до 5.5 В, а расстояние между контактами 2.54 мм упрощает использование со стандартными беспаечными макетными платами и перфорированными платами с шагом отверстий 2.54 мм. Код производителя: 2862 По сравнению с предыдущей версией MinIMU-9 v5, в версии v6 акселерометр/гироскоп MEMS LSM6DS33 заменен на более новый LSM6DSO, который предлагает ряд улучшений, таких как более низкий уровень шума и более высокая максимальная скорость передачи данных для гироскопа. MinIMU-9 v6 должен служить прямой заменой для MinIMU-9 v5 во многих приложениях; в других случаях могут потребоваться изменения в программном обеспечении. Модуль MinIMU-9 v6 также совместим по выводам с AltIMU-10 v6 , который предлагает ту же функциональность, дополненную цифровым барометром, позволяющим получать данные о давлении и высоте. AltIMU имеет второе монтажное отверстие и на 5.08 мм длиннее, чем MinIMU. Любой код, написанный для MinIMU-9 v6, должен также работать с AltIMU-10 v6.
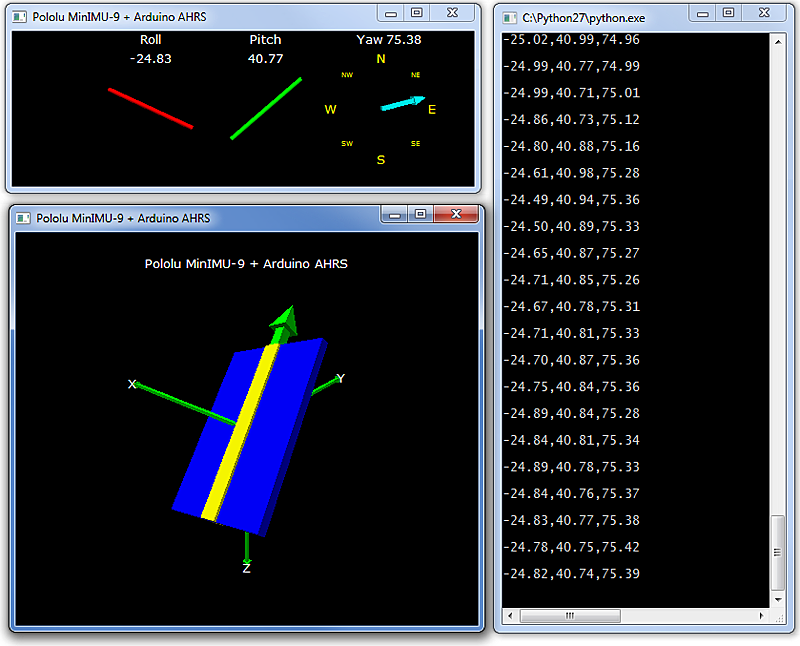
Микросхемы LSM6DSO и LIS3MDL имеют множество настраиваемых параметров, включая динамически выбираемую чувствительность для гироскопа, акселерометра и магнитометра. Для каждого датчика также предусмотрен выбор скорости передачи данных. Доступ к обеим микросхемам осуществляется через общий интерфейс I²C/TWI, что позволяет адресовать датчики индивидуально по одной тактовой и одной линии данных. Кроме того, вывод конфигурации адреса ведомого устройства позволяет пользователям изменять I²C-адреса датчиков и подключать два MinIMU к одной шине I²C. (Дополнительную информацию см. ниже.) Девять независимых показаний вращения, ускорения и магнитного поля (иногда называемых 9 степенями свободы) предоставляют все данные, необходимые для создания системы отсчета положения и курса (AHRS). С помощью соответствующего алгоритма микроконтроллер или компьютер могут использовать эти данные для расчета ориентации платы MinIMU. Гироскоп может использоваться для очень точного отслеживания вращения в короткие промежутки времени, в то время как акселерометр и компас могут помочь компенсировать дрейф гироскопа с течением времени, предоставляя абсолютную систему отсчета. Соответствующие оси двух микросхем выровнены на плате для облегчения этих вычислений слияния данных с датчиков. (Пример такой системы с использованием Arduino см. на рисунке ниже и в разделе «Пример кода» ниже.) Визуализация ориентации AHRS, рассчитанной на основе показаний MinIMU-9:
Плата-носитель включает в себя линейный стабилизатор напряжения с низким падением напряжения, обеспечивающий напряжение 3.3 В, необходимые для LSM6DSO и LIS3MDL, что позволяет питать модуль от одного источника питания напряжением от 2.5 В до 5.5 В. Выход стабилизатора доступен на выводе VDD и может подавать почти 150 мА на внешние устройства. Плата-адаптер также включает в себя схему, которая сдвигает тактовый сигнал и данные линий I²C до того же уровня логического напряжения, что и подаваемый VIN, что упрощает подключение платы к 5-вольтовым системам. Расстояние между контактами на плате составляет 2.54 мм, что упрощает ее использование со стандартными беспаечными макетными платами и перфорированными платами с шагом отверстий 2.54 мм. Характеристики:
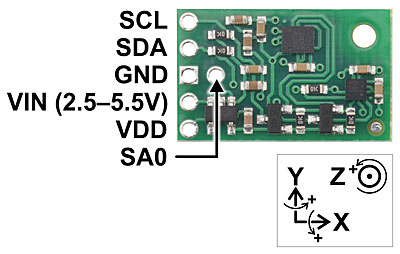
Обозначения:
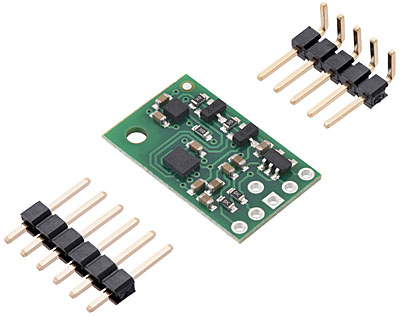
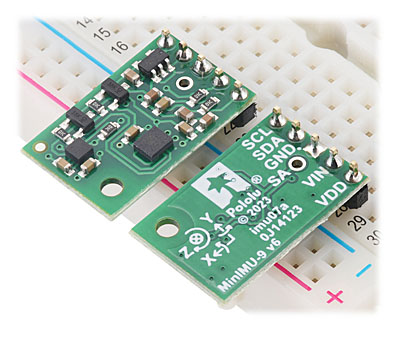
Комплектация: В комплект поставки входят: полоска из 1×6 штырьковых разъемов с шагом контактов 2.54 мм и полоска из 1×5 угловых штырьковых разъемов с шагом контактов 2.54 мм, как показано на рисунке ниже. Вы можете припаять к плате выбранную вами полоску разъемов для использования с нестандартными кабелями или беспаечными макетными платами, либо припаять провода непосредственно к самой плате для более компактной установки. Плата имеет два монтажных отверстия, подходящих для винтов №2 или M2 (не входят в комплект).
Использование MinIMU-9 v6: Подключение: Для использования MinIMU-9 v6 необходимо как минимум четыре контакта: VIN, GND, SCL и SDA. VIN следует подключить к источнику напряжения от 2.5 В до 5.5 В, GND - к 0 В, а SCL и SDA - к шине I²C, работающей на том же логическом уровне, что и VIN. (В качестве альтернативы, если вы используете плату с системой 3.3 В, вы можете оставить VIN отключенным и обойти встроенный стабилизатор, подключив 3.3 В напрямую к VDD.)
Контакты CS, готовности данных и прерывания микросхем LSM6DO и LIS3MDL недоступны на плате MinIMU-9 v6. В частности, отсутствие контакта CS означает, что дополнительный интерфейс SPI этих микросхем недоступен. Если вам нужны эти функции, рассмотрите возможность использования других плат-носителей LSM6DSO и LIS3MDL.
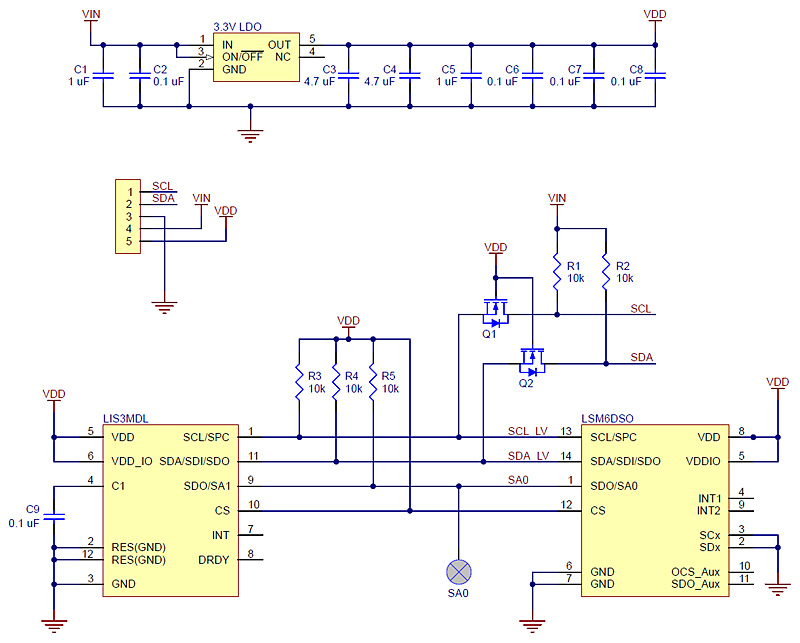
Приведенная выше схема показывает дополнительные компоненты, которые используются на плате-носителе для упрощения работы LSM6DSO и LIS3MDL, включая стабилизатор напряжения, позволяющий питать плату от одного источника напряжения от 2.5 В до 5.5 В, и схему преобразования уровней, обеспечивающую связь по I²C на том же уровне логического напряжения, что и VIN. Эта схема также доступна для скачивания в формате PDF. I²C-интерфейс: Гироскоп и акселерометр LSM6DSO, а также магнитометр LIS3MDL могут быть подключены и сконфигурированы через шину I²C. Каждый из трех датчиков работает как ведомое устройство на той же шине I²C (т.е. их тактовые и информационные линии соединены вместе для упрощения связи). Кроме того, преобразователи уровней на тактовой (SCL) и информационной (SDA) линиях I²C позволяют осуществлять связь по I²C с микроконтроллерами, работающими при том же напряжении, что и VIN (от 2.5 В до 5.5 В). Подробное описание протоколов, используемых каждым устройством, можно найти в техническом описании LSM6DSO и LIS3MDL. Более подробная информация об I²C в целом содержится в спецификации шины I²C от NXP. Микросхемы LSM6DSO и LIS3MDL имеют отдельные адреса ведомых устройств на шине I²C. Плата соединяет выводы выбора адреса ведомого устройства (SA0 или SA1) обеих микросхем и замыкает их на напряжение VDD через резистор 10 кОм. Вы можете установить низкий уровень на выводе SA0 для изменения адреса ведомого устройства. Это позволяет подключить два MinIMU (или MinIMU v6 и AltIMU v6) к одной шине I²C. В следующей таблице показаны адреса ведомых устройств датчиков:
Оба чипа в MinIMU-9 v6 совместимы как со стандартами I²C в быстром режиме (400 кГц), так и в обычном режиме. Пример кода: Разработана базовая библиотека LSM6 для Arduino и библиотека LIS3MDL для Arduino , которые упрощают взаимодействие MinIMU-9 v6 с платой, совместимой с Arduino, например, A-Star . Они также упрощают настройку датчиков и считывание необработанных данных гироскопа, акселерометра и магнитометра. Для демонстрации возможностей использования этих данных, вы можете превратить Arduino, подключенный к MinIMU-9 v6, в систему определения положения и курса (AHRS) с помощью этой программы для Arduino . Она использует данные с MinIMU-9 для расчета оценочных углов крена, тангажа и рыскания, а результаты работы AHRS можно визуализировать с помощью программы 3D-тестирования на вашем ПК (как показано на скриншоте выше). Это программное обеспечение основано на работах Жорди Муньоса, Уильяма Премерлани, Хосе Хулио и Дуга Вайбеля. Советы по протоколу подключения: В технических описаниях содержится вся необходимая информация для использования датчиков на MinIMU-9 v6, но поиск важных деталей может занять некоторое время. Вот несколько советов по взаимодействию и настройке LSM6DSO и LIS3MDL, которые, как мы надеемся, помогут вам быстрее начать работу: Гироскоп, акселерометр и магнитометр по умолчанию находятся в режиме пониженного энергопотребления. Для их включения необходимо установить соответствующие регистры конфигурации. С помощью одной команды I²C можно считывать или записывать данные в несколько регистров LIS3MDL, активировав старший бит адреса регистра для включения автоматического увеличения адреса. Адрес регистра в LSM6DSO автоматически увеличивается при многобайтовом доступе, что позволяет считывать или записывать данные в несколько регистров за одну команду I²C. В отличие от работы некоторых других датчиков ST, автоматическое увеличение включено по умолчанию; его можно отключить с помощью поля IF_INC в регистре CTRL3_C. В дополнение к техническим описаниям, компания ST предоставляет примечания по применению для LSM6DSO и LIS3MDL, содержащие дополнительную информацию и рекомендации по их использованию. Ссылки:
Отзывы покупателей про Модуль Pololu MinIMU-9 v6 гироскоп, акселерометр и компас (LSM6DSO and LIS3MDL) пока нет ни одного отзыва - станьте первым!
Написать отзыв: Есть вопросы по "Модуль Pololu MinIMU-9 v6 гироскоп, акселерометр и компас (LSM6DSO and LIS3MDL)" ?
Дорогие друзья! Мы стараемся держать на сайте информацию про наличие товаров и цены на них в АКТУАЛЬНОМ состоянии. Корректировки происходят постоянно. Если вы находите цену на товар завышенной, напишите нам про это с указанием ссылки на товар. Мы рассмотрим письмо и или обоснуем цену, или подкорректируем ее. Ассортимент магазина очень большой и иногда бывают ошибки в ценообразовании, особенно при скачках курса доллара. Благодарим за понимание.
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной

")
")
")
")