|
Каталог
|
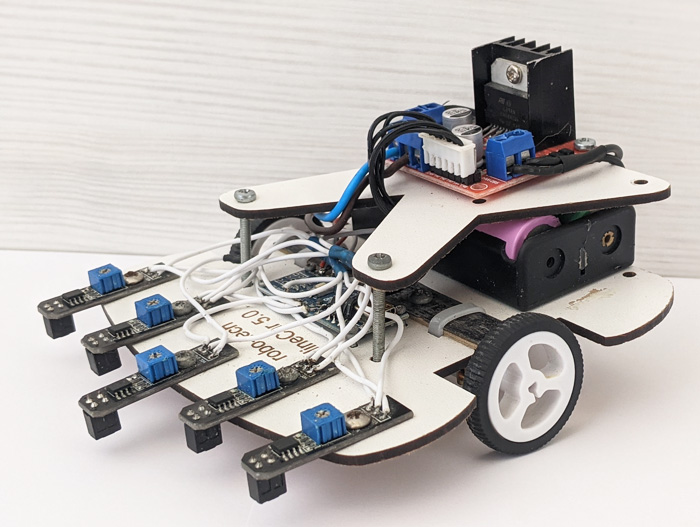
Створення робота, який їздить по лінії2021-10-06 Всі статті →При створенні будь-якого робота, потрібно встановити: датчики (показання яких, буде зчитувати робот), керуючі модулі (для виведення результатів роботи) та скетч (це алгоритм за яким повинен працювати робот). У нашому випадку, ми оснащуємо машину, цифровими датчиками лінії, а в ролі керуючих модулів виступатимуть два мікродвигуни з колесами на валах.
Для побудови робота знадобиться:
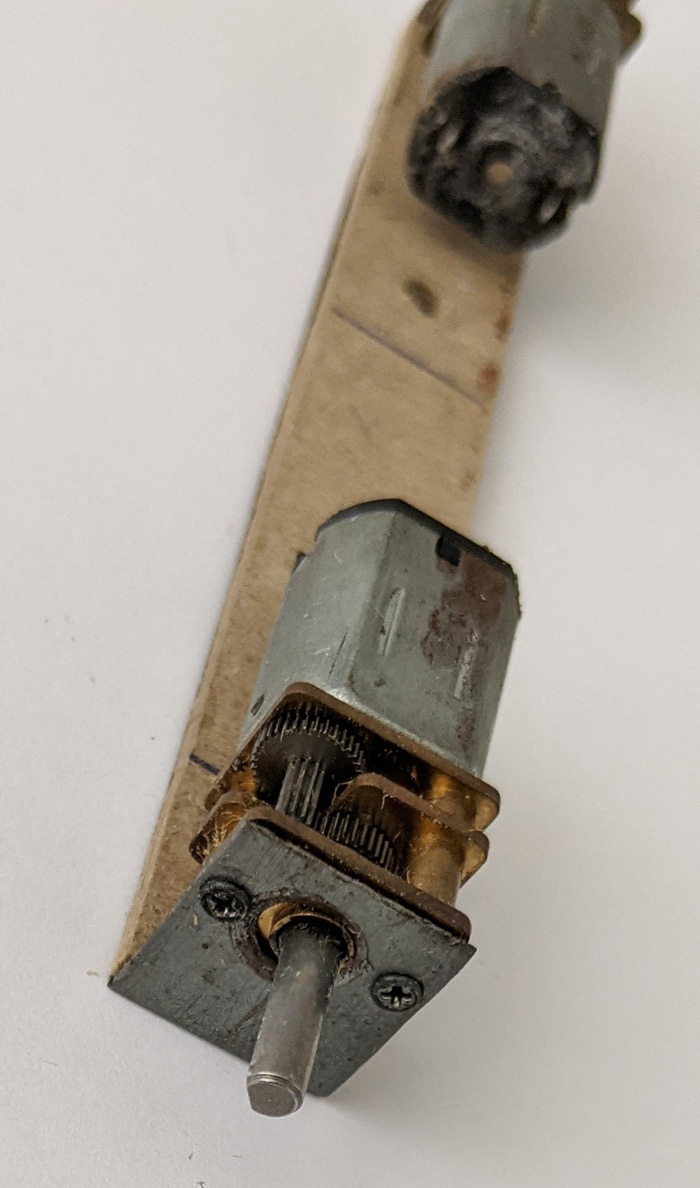
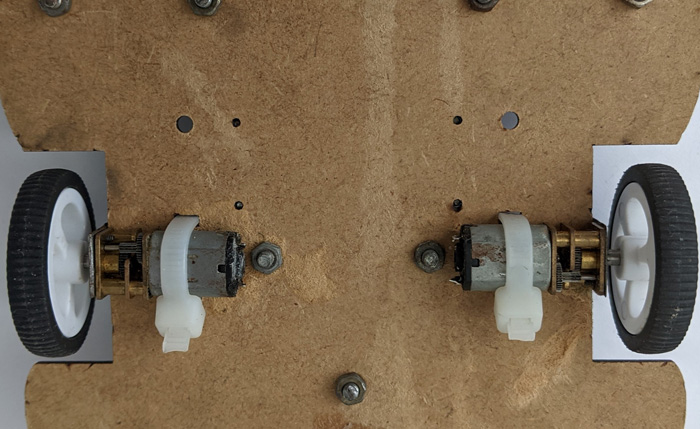
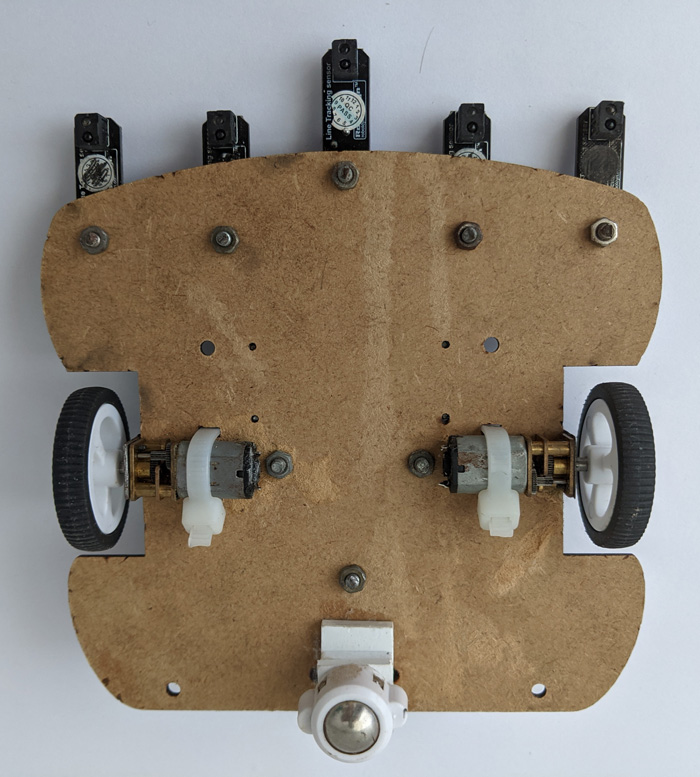
Для початку потрібно зробити платформу на якій все буде кріпитись. Може бути будь-якої форми. Головне, щоб вона вміщала всі компоненти. Наступний крок зробити мотораму, моя зроблена зі смужки листового металу 1мм зігнута в обох кінцях під 90°. В ньому зроблені два отвори 4мм для валів двигунів, чотири отвори 1мм для кріплення двигунів (гвинти можна взяти з непотрібного телефону). Ось як на фото.
Моторама до платформи закріплена за допомогою двох 3мм гвинтів. Для надійності стягнуто хомутами.
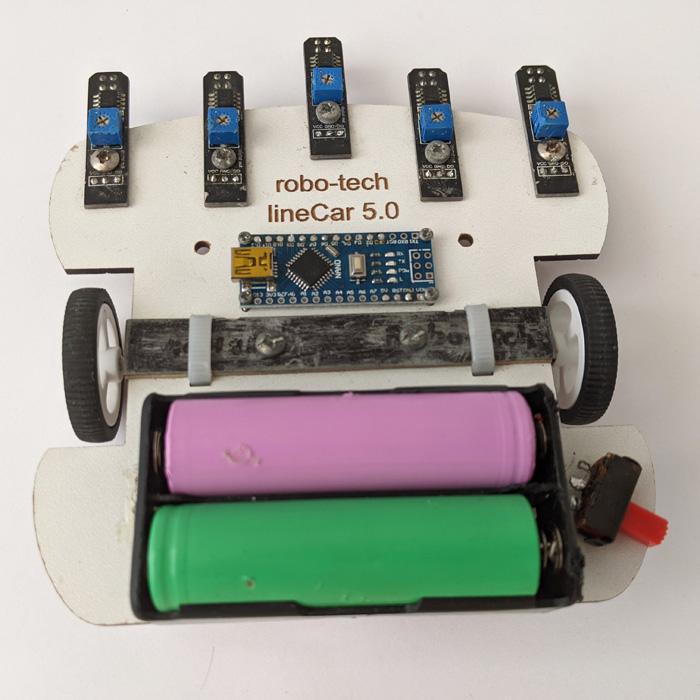
Для кріплення датчиків потрібно зробити отвори 3мм, та затягнути гвинтами. Також для стійкості робота потрібно закріпити кулькове колесо. Закріплюємо так, щоб датчики могли визначити лінію (для цього потрібно приклеїти на відстані до платформи)
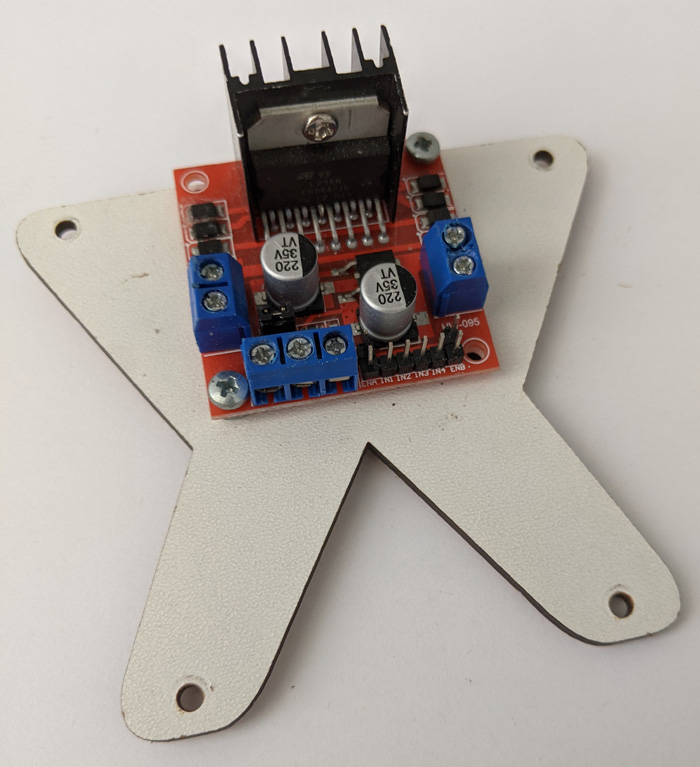
Ардуіно і відсік для акумуляторів можна закріпити за допомогою двосторонньої клейкої стрічки драйвер двигунів кріпиться за допомогою двох-чотирьох 3мм гвинтів.
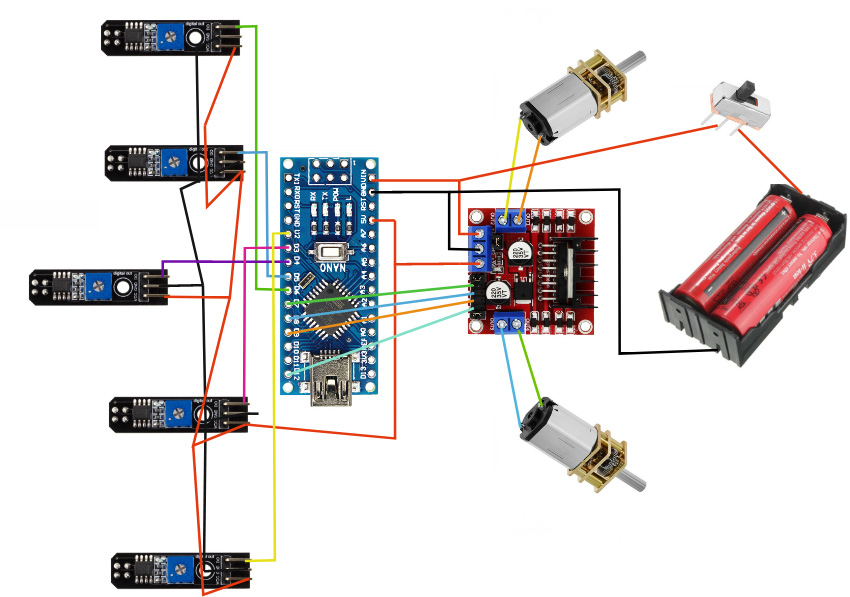
Закріпивши всі елементи паяємо все по схемі
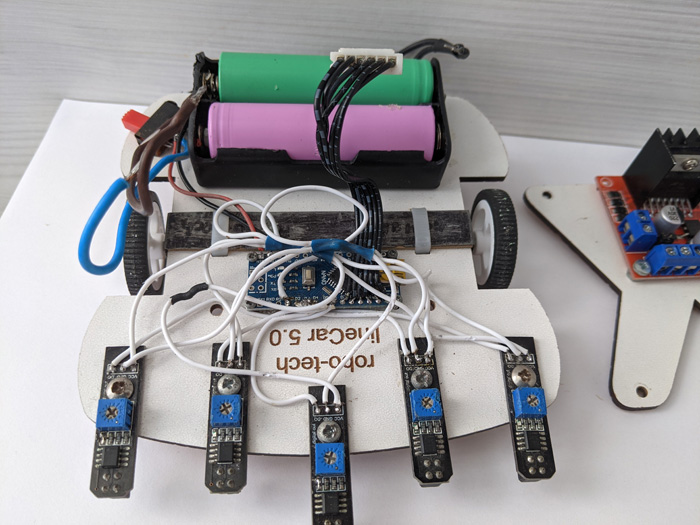
щось подібне має вийти
Перевіривши схему на працездатність можна приступати до програмної частини ось код для Arduino IDE з простим алгоритмом, який підходить для першого запуску. Перевіривши, що все працює добре, можна розробляти кращі алгоритми для коду. Тепер маючи робоплатформу можна практикувати програмування і розробляти дивовижні алгоритми для швидкісного проходження траси. Завантаження до проекту:
Дякуємо Вам за звернення! Ваш відгук з'явиться після модерації адміністратором.
Поки немає відгуків на цю статтю.
|
Графік роботи магазину:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Нд: вихідний