|
Каталог
|
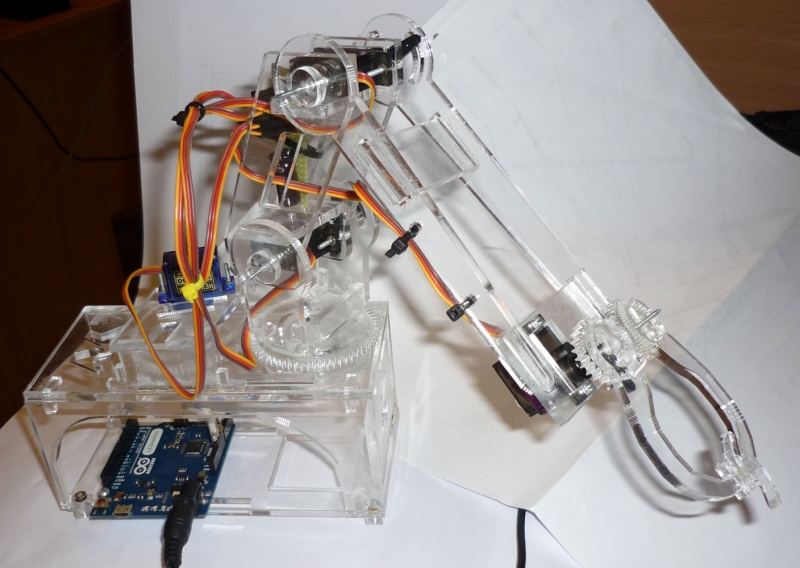
Набор для изготовления робота – манипулятора под управлением платы Arduino Leonardo. Arduino leonardo робот манипулятор. Кравченко А.В. г. Киев. Робот манипулятор фото 1 можно собрать из готового набора деталей фото 2, с управлением от платы Arduino Leonardo. Внимание! Детали имеют специфический начальный запах (запах связан с технологией изготовления), перед сборкой детали необходимо проветрить в темном сухом месте. После удаления защитной пленки, запах исчезнет. В набор входят только пластмассовые компоненты для изготовления корпуса робота. Перед сборкой робота необходимо прописать в плату рабочий скетч и подключить все серводвигатели к плате. Проверить их работоспособность на холостом ходу. Внимание, новые серводвигатели рекомендуется обкатать. Для этого включить прошитую плату и подключить серводвигатели на 2- 3 минуты работы. После чего необходимо 20 минут дать остыть микросхеме управления. Эту операцию проделать 5-6 раз. Для сборки необходимы инструменты: набор мини отверток фото 3, микродрель, сверло диаметром 1,8 мм, пинцет, мини плоскогубцы. Внимание! Для сборки робота дополнительно необходимо еще купить: 4 шт. серводвигателя (MG90S), плата Arduino Leonardo (можно клон), провода переходники (схема соединения рис 1), блок питания (7,5 В 1А), 8 винтов М2х20 и 8 гаек М2, 10 винтов М3х10 и гаек, 2 винта М3х14 и 12 гаек М3, 5 гвоздей диаметром 1,8 мм длиной 40 мм. Прежде всего, с трафарета необходимо аккуратно выдавить (головкой карандаша) детали. После чего, с деталей снимается (канцелярским ножом поддевается край пленки) защитная пленка с двух сторон. С одной стороны пленка цветная, с другой стороны пленка прозрачная. Особую осторожность необходимо уделить шестеренкам, так как они очень хрупкие. На первом этапе собираются отдельно узлы робота. Верхняя крышка корпуса с шестеренками фото 4. Оргстекло имеет свойство изменять форму, поэтому каждое отверстие для осей, необходимо просверлить еще раз сверлом диаметром 1,8 мм. Сначала два отверстия по середине - верхней крышки с надписью AVK robotics фото 5. Затем сверлятся отверстия в каждой шестеренке фото 6. На диск серводвигателя устанавливается качалка фото 7. После чего собираются узлы шестеренки двигателя, и шестеренки крана рис 2. К этим узлам предъявляются следующие требования: они должны быть съемными, передача вращения от двигателя на основание крана должна быть шестеренчатая. Основание на шестеренке не должно качаться во время вращения. Двигатель должен быть съемным. Не смотря на хорошую подгонку отверстий, ось основания (башни) может шататься во время вращения, для этого, под верхней крышкой, ось основания закреплена диском противовеса (диаметр диска совпадает с диаметром основания, башни). Между диском и верхней крышкой желательно установить тонкую (0,4 мм) фторопластовую шайбу, для улучшения скольжения поворотного узла. Диски и шестерни собираются как сендвич рис 3. И в шестернях и в дисках есть полукруглые пазы, для установки и жесткого крепления винтов. Во время регулировки положения серводвигателей диски можно поворачивать относительно шестерен на 20 грд, тем самым подстраивать положение вала серводвигателя и шестеренки. После сборки узла фото 8, нижние диски необходимо приклеить к осям любым быстросохнущим клеем для оргстекла. Далее собирается нижняя часть корпуса. Устанавливаются ножки по периметру и две лапы, для регулировки устойчивости манипулятора. Во время экспериментов с манипулятором лапы раздвигаются фото 9. На втором этапе собирается корпус манипулятора и устанавливается серводвигатель вращения крана. К нижней крышке корпуса приклеиваются боковые панели. Нижняя крышка имеет переднюю часть в которой вырезан прямоугольник фото 9. Боковые панели устанавливаются вертикально, утолщенными ножками к передней части робота фото 10 и приклеиваются клеем. Передняя стенка робота имеет надпись AVK, приклеивается между боковыми панелями. Как только клей высох, приклеивается верхняя крышка корпуса. Шестерня крана должна быть на передней стороне корпуса. Шестерня серводвигателя посередине корпуса фото 11. После этого серводвигатель 4 (поворот крана) крепится к ромбовидной панели. На боковую панель корпуса устанавливается на винтах стойка серводвигателя 4. К серводвигателю крепится диск с качалкой. После чего эта конструкция клеится к стойке фото 12. На третьем этапе собирается кран и стрелы робота, для этого необходимо установить серводвигатели на балку крана фото 13. Обратите внимание на правильность расположения балки и серводвигателей. После чего собирается вторая сторона балки крана. В балке в отверстиях для осей, необходимо пройтись сверлом диаметром 1,8 мм. После чего в внутреннюю часть балки вставляется гвоздь, с наружной стороны балки две шайбы. Между деталями стрела и балка крана должен быть промежуток в 2 мм. Эти детали должны свободно вращаться на гвозде фото 14. Фиксируются поворотные узлы малой шайбой фото 15. Средними перегородками соединяются балка крана и стрела фото 16. Перегородки балки крана клеятся только с одно стороны, противоположной креплению двигателей. На четвертом этапе собирается клешня. На пластину клешни устанавливается серводвигатель фото 17. Под клешню серводвигателя клеится малая шестеренка фото 18. Напротив отверстия пластины фото 17 устанавливаются две регулировочные пластинки (с отверстием), так что бы малые шестерни клешни серводвигателя и поворотной клешни совпадали по высоте фото 19, фото 20. Клешни робота приклеиваются к шестеренкам. Боковые отверстия клешни и шестеренки должны совпадать. В левую клешню с шестеренкой вставляется гвоздь. Этот узел вставляется в пластину с отверстиями фото 19. На захваты клешней устанавливаются усики прижима. Усики фиксируются пружинной проволокой, так что бы при сжатии клешни создавалось небольшое прижимное усилие. В нижней части захвата клешни можно приклеить дуги. Далее соберите нижние части крана фото 21. Собранный кран ставят так, что бы он опирался стрелой на корпус фото 21. В этом положении можно собирать стрелу. Необходимо следить за тем, что бы поворотные механизмы крана свободно вращались, не цепляясь за распорки. В стрелу вставляют распорку и пластину собранной клешни и приклеивают с обеих сторон фот 22, фото 23. Еще раз проконтролируйте зазоры фото 24. Если все в порядке, дайте клею застыть. На пятом этапе соберите муфту поворотной башни фото 25, фото 26. Разведите кран и стрелу в одну линию. Приклейте кран строго вертикально к муфте фото 27, фото 28, фото 29. При этом можно использовать пластины или уголки для жесткой фиксации деталей. Зафиксируйте поворотную башню фото 30 рис 2, рис 3. Приклейте передние распорки фото 31. Конструкция должна просохнуть в течении одного часа. Согласно схеме соединения рис 1 стыкуйте проводами сервоприводы и плату Arduino Leonardo. Для упрощения соединения автор сделал шлейф к плате коммутации фото 32, фото 33. Подключение производится в следующем порядке. Servo1 – клешня, Servo2 – стрела, Servo3 – кран, Servo4 – поворот башни крана рис 7. Программирование. С сайта arduino.cc скачать программу arduino 1.5.6 скопировать в тело программы листинг sketh_jun1 рис 4. Провести компиляцию листинга, если нет ошибок, подключить плату Arduino Leonardo через USB кабель к ПК. В программе arduino 1.5.6 выбрать эту плату рис 5. Выбрать COM порт рис 6. Провести запись программы на плату стрелкой вправо. Настройка. Внимание, во время настройки нельзя давать большие усилия на серводвигатели. Серводвигатели могут заклинить, или шестерни могут перерезать зубцы вала, или от перегрева сгорит микросхема серводвигателя. Каждую операцию необходимо производить с открученными качалками. Перед настройкой рекомендуется каждый узел проверить отдельно. Практика настройки серводвигателей. Серводвигатель имеет три положения 0-90-180 градусов. При этом импульсы управления на серводвигатель подаются соответственно 1,0-1,5-2,0 миллисекунду из периода 20 миллисекунд. Эти дискретные состояния в 1,0-1,5-2,0 мС, микросхема успевает отследить, а промежуточные состояния микросхема управления не улавливает. Серводвигатель очень хорошо отрабатывает команды в динамическом (подвижном) состоянии. И совсем не хочет работать в статическом (неподвижном) состоянии. В неподвижном состоянии серводвигатель начинает дребезжать, вал двигателя скачками вращается в прямом и реверсном режиме. Это свойство очень плохо отражается на шестернях серводвигателя и на работоспособности микросхемы управления. Очень часто в крайних положениях 0 или 180 градусов двигатель заклинивает. В этом случае, достаточно разобрать серводвигатель и пинцетом вручную провернуть вал двигателя. После чего включить плату и серводвигатель разобранный. При этом электродвигатель будет набирать обороты в зависимости от положения потенциометра обратной связи. Первый шаг настройки робота, подсоединить серводвигатель клешни. При этом винты крепящие шестерню и качалку сервопривода отсоединить. Подать питание на плату. Дождаться момента когда клешни сомкнуться. Отключить плату, зафиксировать винты шестерни. Смажьте машинным маслом шестерни и трущиеся детали. Включите проверьте. Если серводвигатель сжимает клешни и дребезжит от усилия, необходимо перекинуть шестеренку на один или два зуба назад (что бы усилия были меньше). Второй шаг настройки робота Затем настраиваются серводвигатели крана и стрелы. Серводвигатель стрела отсоединяется от стрелы винтами, прикрученными к качалке фото 29. Подается питание на плату. Серводвигатель поворачивает качалки. Дождаться момента когда стрела станет под 90 грд к карану. Отключить плату, зафиксировать винты качалки. Проверить в включенном состоянии. Если стрела не наезжает на кран и не заворачивается назад за кран, то можно оставить фиксированное состоянии, иначе необходимо повернуть стрелку по отношению к качалке в нужную сторону. Аналогично настраивается кран фото 29. Необходимо уловить правильное положение качалки. Если качалка выходит за пазы, необходимо переставить качалку на валу серводвигателя. Настройка поворота башни крана выполняется аналогично предыдущим рекомендациям. Желательновыставить башню с неприкрученной муфтой фото 26. Проверить работоспособность servo 4 и выставить башню в оптимальное положение. Затем прикрутить муфту. Перспективы. На будущее планируется оснастить робота: видеокамерой (гнездо для серво на стреле), гусеничной платформой под корпус робота, для передвижение по комнате. Возможно дооборудовать радиоуправлением. Внимание: запрещается глотать, жевать детали робота. Перед сборкой необходимо тщательно проветрить трафарет с деталями. Во время включения необходимо установить робота на безопасном расстоянии диаметром 0,3 м (существует вероятность неправильной работы манипулятора), во избежание удара. Нельзя эксплуатировать робота без присутствия людей. Разрешается сборка робота детям не младше 12 лет. Нельзя вставлять пальцы в движущиеся механизмы робота, во время работы. Эксперименты. Как только робот настроен, его можно включить на 10 минут беспрерывной работы. Робот может поднимать предметы весом 100-150 грамм. В программе можно изменить угол начального состояния робота и угол поднятия и переноса деталей. При правильной сборке, робот работает сразу. Удачи в освоении робототехники!
/* * Sketh_jun1.ino * * Created: 5/17/2014 8:31:51 AM * Author: Алексей */ #include
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной