|
Каталог
|
Розробка радіокерованого танка на базі Arduino Nano2024-06-13 Все статьи →Вступ. Сучасні технології відкривають широкі можливості для створення складних та цікавих проектів. Одним з таких проектів є радіокерований танк на базі мікроконтролера Arduino Nano. У цій статті ми розглянемо розробку моделі танка з дистанційним керуванням за допомогою Bluetooth, яке включає різноманітні функції, такі як рух вперед, назад, повороти, освітлення, парктронік, та інші. Опис проблеми.
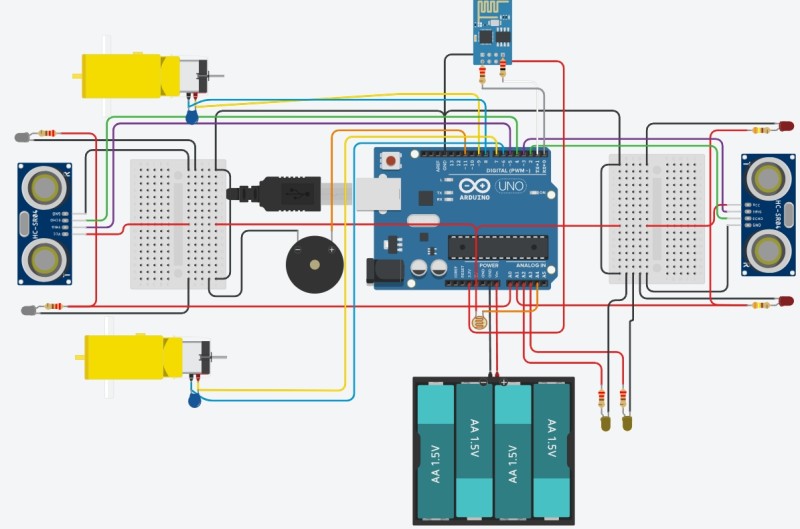
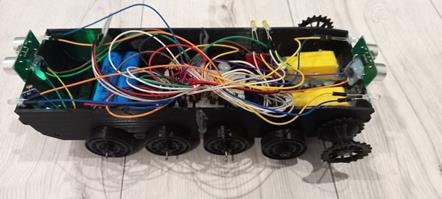
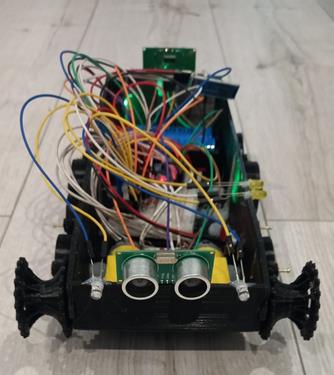
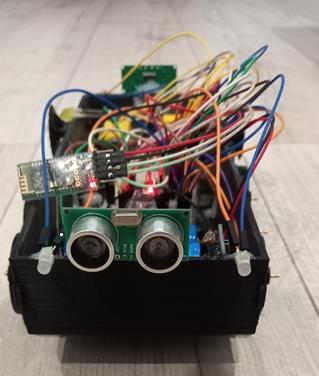
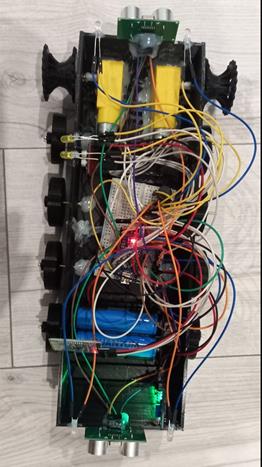
Розробка радіокерованого танка включає кілька технічних викликів, серед яких: 1. Реалізація реалістичної механіки пересування танка. 2. Впровадження системи парктроніка для уникнення перешкод. 3. Забезпечення зворотного зв’язку та керування між танком та гаджетом за допомогою Bluetooth-модуля через Bluetooth-термінал. 4. Впровадження світлодіодів для системи освітлення та імітації стрільби. Модель танка. Модель танка була створена на 3D-принтері і оснащена десятьма колесами, з яких два ведучих, що підключені до електродвигунів через редуктори. Решта коліс призначені для підтримки гусениць. Для моделювання була використана модель танка Panzerkampfwagen VI Ausf.H (Tiger 1). Розробка корпусу ведеться й надалі, на даний момент тільки макет з робочою електронікою. Схема електроніки:
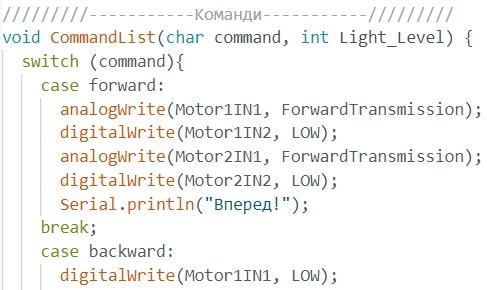
Програмне забезпечення. Код для управління танком написаний для мікроконтролера Arduino Nano і включає наступні функції:
Код програми та відео роботи танка прикріплені до файлу звіту. Компоненти електроніки:
Призначення компонентів електроніки: Arduino Nano використана за основу пристрою. Макетна плата та перемички слугують з’єднувальними елементами усіх компонентів із мікроконтролером. Живлення схеми іде від двох послідовно з’єднаних акумуляторів що дають в сумі 7.4В. Зарядка акумуляторів здійснюється через зарядний модуль з роз’ємом Type-C, який використовується окремо від пристрою. Bluetooth-модуль для реалізації дистанційного керування. Логіка драйвера mini-L298N використана для керування моторами. Ультрасоніки використанні для визначення відстані до перешкод і відповідного повідомлення про це користувачеві та зупинки техніки. Бузер призначений для відтворення звуків роботи режима парктронік. Датчик освітленості використовується для регулювання освітленості світлодіодів - чим темніше тим яскравіше світяться світлодіоди. Світлодіоди підключені до плати через резистори 220Ом. А червоні через 320Ом через їхню чутливість.
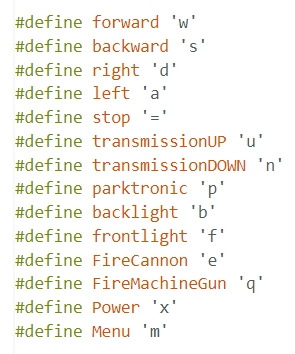
Керування: Керування відбувається через передачу пристрою команди у вигляді букви, тому ви можете використовувати будь-який BlueTooth термінал, або є варіанти з джойстиками, де ви можете налаштувати яку команду передаватиме кнопка джойстика. Ініціалізація команд в коді:
Щоб додати нові команди проініціалізуйте їх та додайте новий case у switch:
Висновки. Розробка радіокерованого танка на базі Arduino Nano вимагає знань з електроніки, програмування та механіки. Впровадження додаткових функцій, таких як парктронік, світлодіодне освітлення та дистанційне управління, дозволяє створити цікавий та навчальний проект, який може бути корисним для вивчення основ робототехніки та мікроконтролерів. Посилання: Відео з роботою танка: Фото танка:
Общая оценка:
Оценка
"Розробка радіокерованого танка на базі Arduino Nano"
сделана на основе 2 оценок 2 клиентских отзывов. Благодарим Вас за обращение! Ваш отзыв появится после модерации администратором.
andrewekiwe
06.12.2024 09:16:44

круто
Ильяс начинающий
05.09.2024 21:22:19
Класс, еще башню прикрепить...
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной