|
Каталог
|
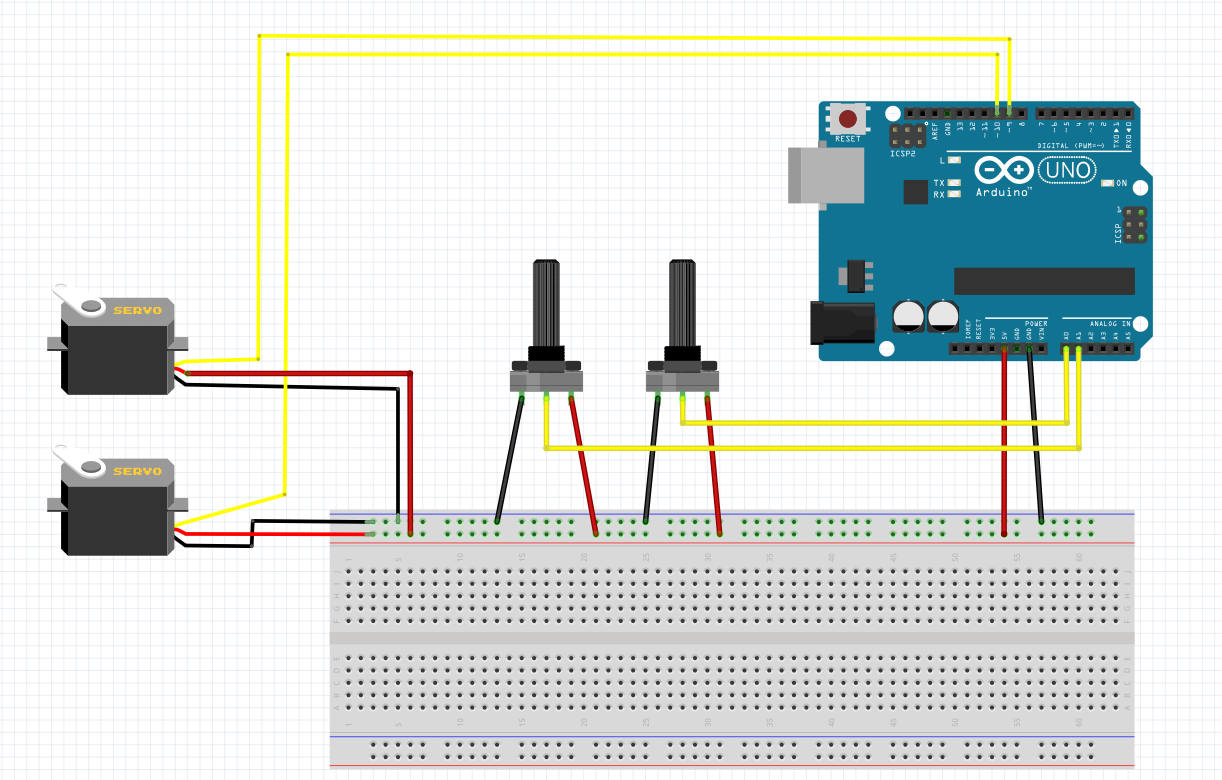
Arduino и 2х осевой подвес с серво2016-04-28 Все статьи →Всегда интересно чем-то по управлять. Будь-то самолет, автомобиль или камера. Вашему вниманию представляется проект по управлению чем-то (будь-то лампочка, лазер или камера). За частую для управления используется сервопривод. Сервопривод (следящий привод) — привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводы имеют три контактных провода: питание (красного цвета), земля (коричневого или черного цвета) и сигнальный вход (белого или оранжевого цвета). Управления сервоприводами осуществляется по сигнальной линии при помощи прямоугольных импульсов длительность которых можно регулировать. В сервоприводах подача импульса длительностью 1 мс приводит к установке сервопривода в положение 0, импульс длительностью 1,25 мс устанавливает сервопривод в положение 45 град, 1.5 мс - 90 град, 2 мс - 180 град. После того как импульс подан, вал сервопривода устанавливается в определённой позиции и остается там до поступления следующей команды. Управления сервоприводами осуществляется при помощи переменных резисторам. Резкость поворота, как и точность и градус зависят от номиналов потенциометров. Детали, требуемые для сборки: 1. Arduino UNO, либо какая-то другая плата Аrduino (Nano, Mega и т.д.); 2. 2 сервопривода SG90 или MG 90S Micro; 3. Соединительные провода «папа-папа»; 4. 2 потенциометра (переменных резистора); 5. Беспаечная макетная плата (Breadboard); 6. 2-Axis FPV. Скетч:
Рисунок 1 - Схема подключения
Видео работы:
Общая оценка:
Оценка
"Arduino и 2х осевой подвес с серво"
сделана на основе 1 оценки 1 клиентских отзыва. Благодарим Вас за обращение! Ваш отзыв появится после модерации администратором.
Александр
18.01.2023 19:00:25

спасибо большое! у меня не было времени самому все писать и искать инфу " как подключить" с вашим гайдом я управился за пять минут.
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной