|
Каталог
|
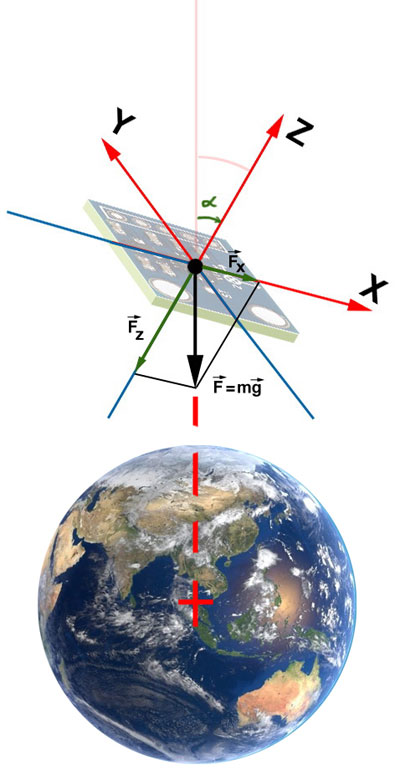
Міряємо кут нахилу за допомогою акселерометру2021-08-19 Все статьи →В попередніх частинах нашої розповіді про аналоговий акселерометр ADXL335 ми навчилися позбавлятися шумів на його виходах - фільтрувати сигнал, а також шукати початок відліку сигналу - визначати нульові покази. Якщо ми встановимо ADXL на якийсь об'єкт і не будемо його повертати, то акселерометр буде міряти силу гравітації, яка діє на об'єкт. Вектор цієї сили завжди направлений вниз - в напрямку центру Землі. При горизонтальному положенні плати акселерометру цей вектор співпадає з віссю Z. Якщо ми повернемо ADXL на деякий кут ? навколо вісі Y, то на виходах акселерометру ми отримаємо напруги, які пропорційні величинам проекцій цієї сили на вісі просторової системи координат. На малюнку ці проекції вектора сили гравітації F позначимо Fx та Fz.
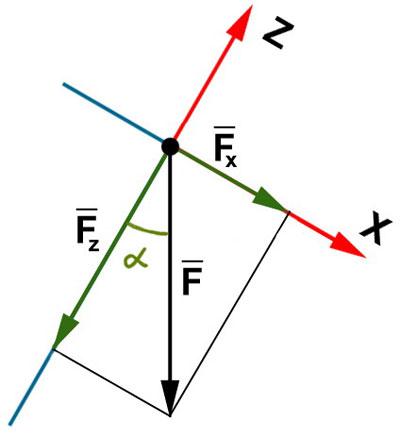
Для пошуку кута повороту ? розглянемо плаский варіант, обмежившись площиною Z0X:
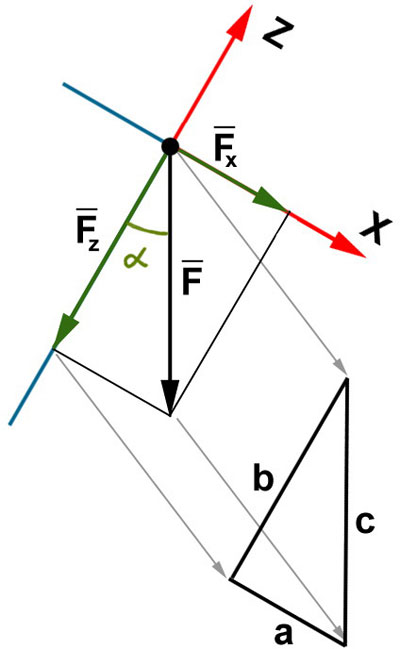
Легко побачити, що вектор F та його проекції Fx та Fz утворюють прямокутний трикутник.
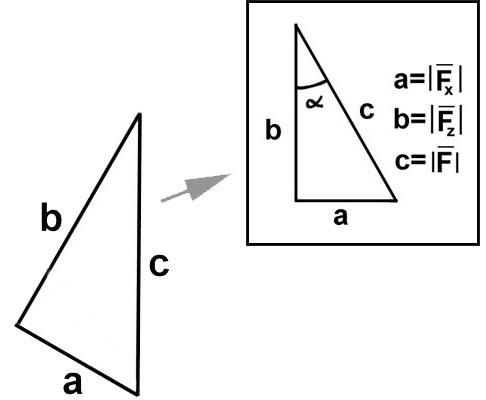
Катет a трикутнику відповідає довжині вектору Fx, катет b - довжині вектору Fz , а сила гравітації F співпадає з гіпотенузою С трикутника.
Очевидь, що ? легко знаходиться зі шкільного співвідношення:
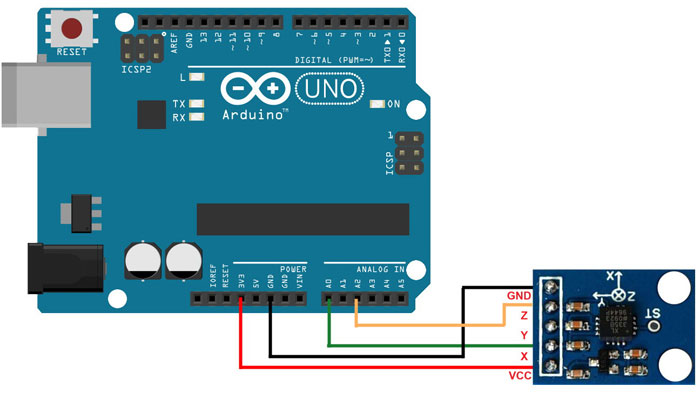
Таким чином, для пошуку кута відхилення об'єкту від горизонтального положення відносно вісі Y потрібно виконати наступний алгоритм: 1. Виміряти напруги на відповідних виходах акселерометру при горизонтальному положенні об'єкту - Uxo та Uzo. Визначити нуль. 2. Визначити величину напруг Ux та Uz при нахиленні об'єкту. 3. Знайти величину відхилення напруг від "горизонтального" стану (від нуля). ?Ux = Ux - Uxo ?Uz = Uz - Uzo 4. Знаючи чутливості акселерометру по вісям Sx=300 мВ, знайти величину проекцій вектору на вісі координат (значення сили гравітації по вісям): Gx = ?Ux / Sx Gz = ?Uz / Sz 5. Обчислити кут: a=arctg(Gx/Gz) Почнемо реалізацію алгоритму. Зберемо схему.
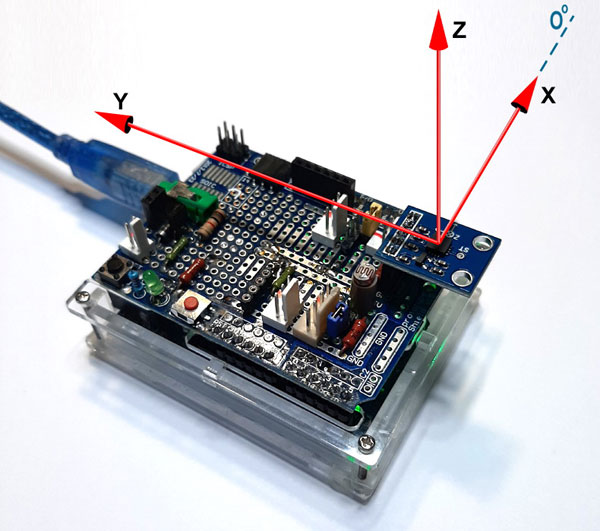
Тепер візьмемо програму з попередньої частини статті (Шукаємо нуль в акселерометрі) та визначимо нульові покази акселерометра по вісям Х та Z. Для цього покладемо контролер з акселерометром горизонтально, так щоб вісь X була паралельна площині столу.
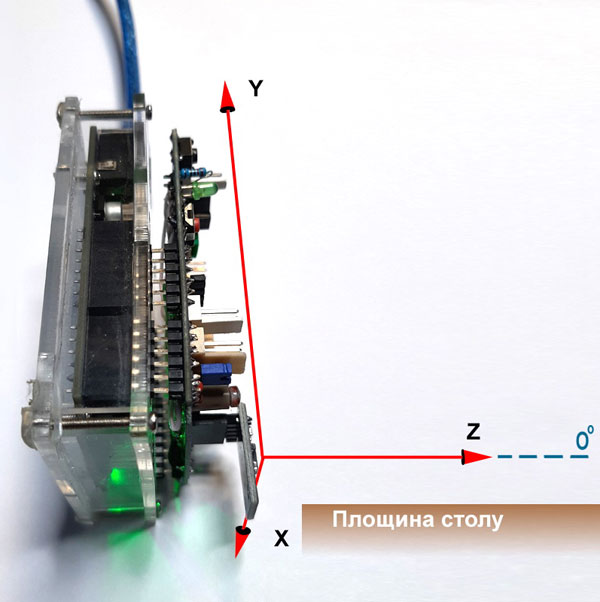
Для зручності я використав саморобний шилд, зібраний на базі Arduino Prototype Shield (код товару ASC111). Відкриваємо монітор порта та дочекавшись сталих значень, запишемо число Ux з точністю 5 знаків після коми. Ставимо контроллер так, щоб вісь Z була паралельна площині столу.
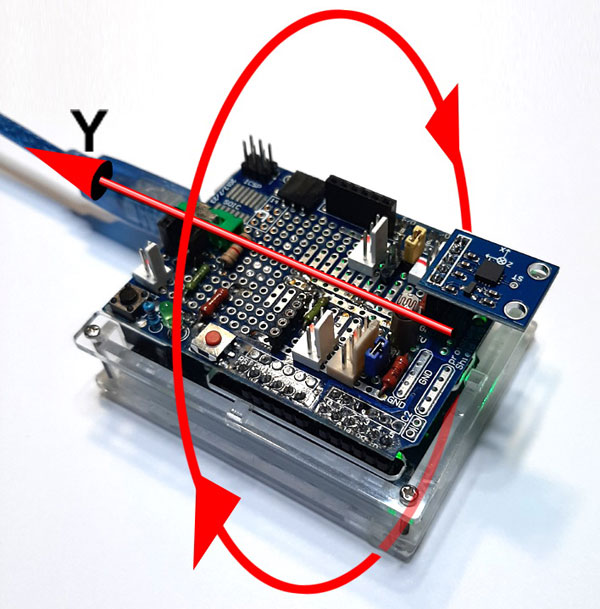
Перезапускаємо скетч і запишемо значення "нулю" Uz. В результаті я отримав такі числа: Uxo = 1.51366 Uzo = 1.56282 УВАГА! У вас, скоріш за все, будуть інші значення. Тепер можна записати в Arduino програму визначення куту нахилу об'єкту відносно вісі Y. Не забуваємо замінити зірочки (*) на свої значення "нулів". #include <Math.h> // підключаємо математичну бібліотеку //Оголошення змінних float ADC_ref=5.0; //максимальне значення напруги у АЦП float analog_resolution=1024.0; //роздільна здатність АЦП float zero_x =*.*****; //значення нулів float zero_z = *.*****; float sensitivity_x = 0.3; //чутливості по вісях float sensitivity_z = 0.3; unsigned int value_x; //значення зчитані з датчика unsigned int value_z; float gx; //проекції вектору гравітації float gz; float angle_y; //кут нахилу void setup() { Serial.begin(9600); } void loop() { value_x = analogRead(A0); // читаємо дані з акселерометру value_z = analogRead(A2); // обчислюємо проекції вектору гравітації на вісі X та Z gx = (value_x/analog_resolution*ADC_ref - zero_x)/sensitivity_x; gz = (value_z/analog_resolution*ADC_ref - zero_z)/sensitivity_z; angle_y =atan2(gx, gz)*RAD_TO_DEG; //розраховуємо кут нахилу //виводимо кут нахилу Serial.print(" Ydeg = "); Serial.println(angle_y); delay(100); } Нахиляємо акселерометр по вісі Y та дивимось на результати у моніторі порта.
Якщо вам достатньо точності в 1 градус, тоді фільтр в останній програмі не потрібен. В іншому випадку ви можете додати його самостійно, але пристрій стане доволі інерційним, на точне вимірювання кута йому знадобиться деякий час, затримка буде пов'язана з інтегральною природою фільтру. ВІТАЮ! Ви побудували простий інклінометр. На цьому наше невеличке дослідження закінчено.
Общая оценка:

Оценка
"Міряємо кут нахилу за допомогою акселерометру"
сделана на основе 1 оценки 1 клиентских отзыва. Благодарим Вас за обращение! Ваш отзыв появится после модерации администратором.
Олександр
14.11.2021 08:55:48


Де скетч?
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной