|
Каталог
|
FPV OSD + GPS без використання польотного контролера2021-09-13 Все статьи →
Після конструювання свого першого радіокерованого літаючого крила появилося бажання встановити систему FPV. З камерою літати стало цікавіше, але бракувало навігаційної інформації, хотілось дізнатися на якій висоті та з якою швидкістю прямує крило. Виникла ідея використати MinimOSD та GPS. Але під'єднати два модулі один до одного просто так – неможливо. Тому що всі прошивки для MinimOSD заточені для використання з різними польотними контролерами, які відсилають данні, що накладаються на картинку. Мені це не підходило, оскільки я не використовував польотник. Тому було прийняте рішення, парсити GPS повідомлення та накладати на відеокартинку за допомогою MinimOSD, оскільки на даній платі встановлений контролер. Комплектуючі купував тут: Ai-Thinker Подвійний навігаційний модуль з антеною GPS + BDS
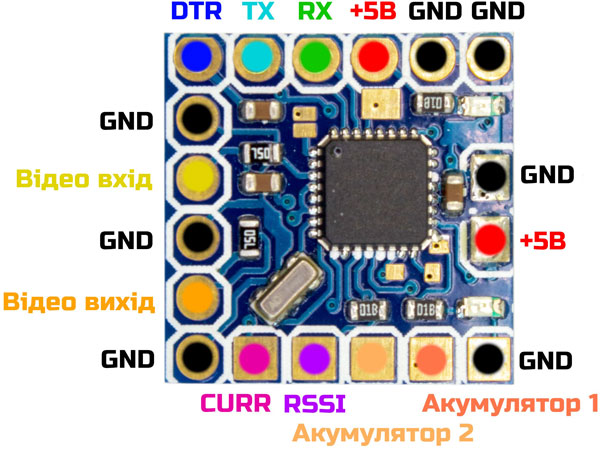
Розташування контактів MinimOSD:
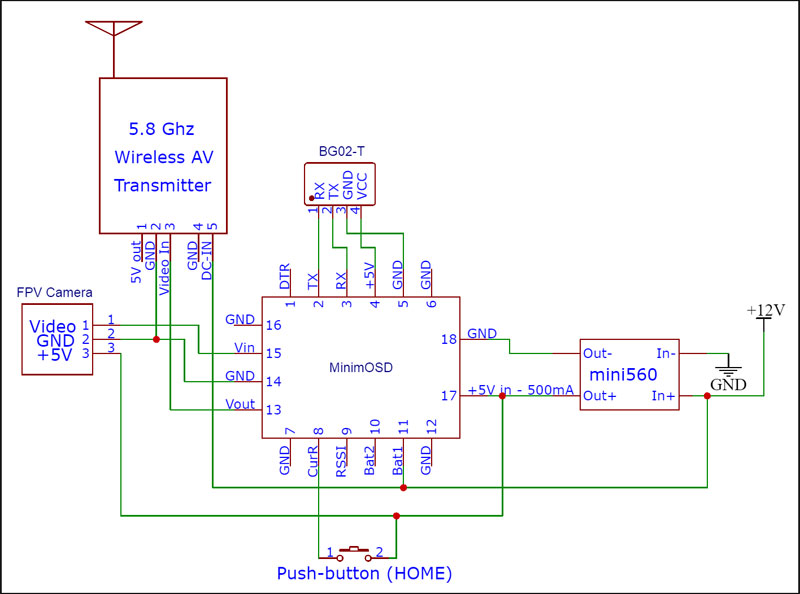
Підключення програматору або GPS відбувається по одному інтерфейсу COM. Тому потрібно запаяти штирьову колодку, щоб можна було в будь-який момент перепрограмувати контролер. Для живлення використовується понижуючий перетворювач на 5В Mini560. Для керування MAX7456 (що находиться на платі), яка використовується для накладання монохромної картинки на відео потік беремо бібліотеку arduino-max7456-master_FIX.rar (прикладаю архів). Рекомендую не скачувати бібліотеку яка находиться за посиланням, оскільки там не справлені проблеми з кодуванням UTF-8 який використовується в Arduino IDE. arduino-max7456-master_FIX.rar в цій версії поправив дану помилку. Перед тим як працювати над програмою потрібно дізнатися на якій нозі контролера висить CS(Chip Select) MAX7456. Відповідно до схеми minimOSD, яку вдалося найти в інтернеті це – D6. Також можна завантажити нові шрифти в пам'ять MAX7456. Для цього потрібно використовувати скетч CharsetLoader_Font_write який находиться в прикріпленому архіві, та змінити файл charset.h на ваш шрифт. Для створення кастомних символів можна використати програму яка находиться в прикладеному архіві, MaxFontEditor. Також за посиланням цікавий конвертер картинок в набір символів шрифту https://www.mylifesucks.de/tools/max7456/ . Парсинг GPS повідомлень. Для виділення навігаційної інформації будемо використовувати бібліотеку яка находиться в архіві, iarduino_GPS_NMEA-master.zip. Також, хотілося додати точку Home для навігаційної системи. Тобто точку старту, від якої можна вираховувати дальність відльоту крила, лічильник пройденої відстані (одометр) та початкові скидання для фіксації максимальної швидкості та висоти. Для цього використовую тактову кнопку яку потрібно під'єднати до виводу CURR. Окрім навігації, додати вимір напруги на акумуляторах та таймер польоту який скидається після натискання кнопки Home. Схема підключення:
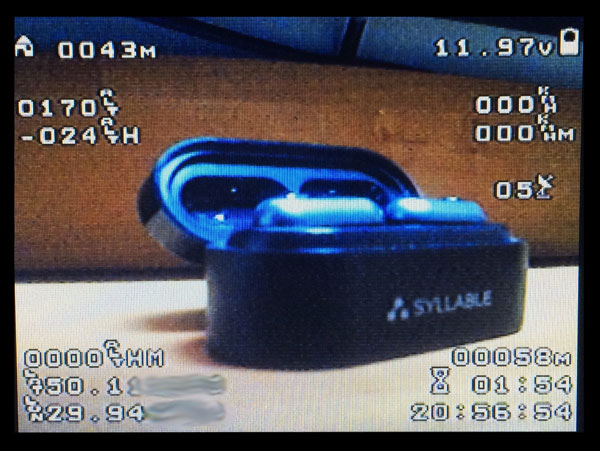
Висновок: Все ж таки вийшло подружити два не залежних модулі, які розраховані на роботу під управлінням польотного контролера. Отримали повністю незалежну відео трансляцію курсової камери разом з навігаційною інформацією. Завантаження:
Общая оценка:
Оценка
"FPV OSD + GPS без використання польотного контролера"
сделана на основе 4 оценок 4 клиентских отзывов. Благодарим Вас за обращение! Ваш отзыв появится после модерации администратором.
Сергій
02.07.2026 20:04:36

NanoDude
09.04.2025 13:27:09
Excellent
Андрій
10.04.2022 23:13:43
Цікаво вийшло. Але, все таки, рекомендую використовувати ПК, так моделі довше живуть..)
Денис
16.09.2021 14:11:41
Цікаво вийшло.
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной