Мощный драйвер шагового двигателя Pololu High-Power Stepper Motor Driver 36v4
код: USA401
Доставка по Украине
Мы отправляем заказы "Новой Почтой" по Украине. Также возможен самовывоз из нашего магазина
6 месяцев
гарантии
Мы даем гарантию на любой товар приобретенный в нашем магазине:
6 месяцев на товары, кроме батареек и аккумуляторов
14 дней на батарейки и аккумуляторы
В случае наступления гарантийного случая товар бесплатно ремонтируется, меняется на аналогичный или возвращается полная сумма его стоимостиВнимательно ознакомьтесь с условиями гарантии
Проконсультируем до и после продажи.
Вы можете задавать вопросы письменно по e-mail или по контактным телефонам нашего магазина
998 грнс НДС
в наличии
Описание
Отзывы
Задать вопрос
Этот дискретный драйвер для шагового двигателя, который обеспечивает управление одним биполярным мотором. Он поддерживает широкий диапазон рабочего напряжения от 8 до 50 В и может обеспечить до 4А на каждую обмотку без пассивного или активного охлаждения. Максимальный ток на обмотку может составлять 6А, но при такой нагрузке потребуется принудительное пассивное и активное охлаждение. Управление драйвером реализовано по средствам интерфейса SPI и имеет обратную связь. Максимальное значение шагов составляет 1/256.
Код производителя: 3730, 36v4
Драйвер Pololu 36v4 разработан на базе DRV8711 от Texas Instruments с внешними MOSFET.
DRV8711 имеет множество настроек, поэтому перед работой с драйвером настоятельно рекомендуется ознакомиться с документацией!
Ключевые особенности:
Широкий диапазон рабочего напряжения от 8 В до 50 В
Ток на обмотку: до 4 А непрерывно без дополнительного пассивного и активного охлаждения (максимально до 6 А с принудительным пассивным и активным охлаждением)
Управление через интерфейс SPI
Дополнительные контакты STEP/DIR через которые можно изменять шаги через интерфейс SPI
Шаги: 1/4, 1/8, 1/16, 1/32, 1/64, 1/128, 1/256
Управление током на обмотку. Драйвер может точно управлять током на обмотках двигателя через SPI, обеспечивая очень плавное и тихое вращение даже на очень малых скоростях.
Контакт STALL позволяет обнаружить остановку при микро шагах
Контакт BEMF позволяет считывать обратную ЭДС двигателя, чтобы определять его движение и остановки, позволяя реализовать сложные алгоритмы управления без дополнительных датчиков.
Драйвер в альтернативном режиме работы позволяет управлять двумя щеточными электродвигателями постоянного тока через ШИМ вместо одного биполярного двигателя через входы STEP/DIR.
Поддерживаемые логические уровни: 1.8 В, 3.3 В и 5 В
Все цифровые выходы реализованы с открытым стоком и подтянуты к внешнему напряжению IOREF для работы с логическими уровнями отличными от 5 В (IOREF можно соединить с соседним выводом 5 В для использования с 5‑вольтовыми логическими уровнями).
Защита от пониженного напряжения, перегрузки по току, короткого замыкания и обратного напряжения (до 40 В).
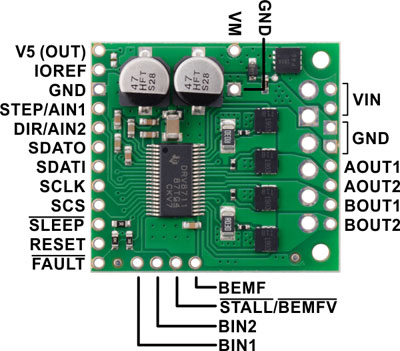
VIN - питание платы от 8 В до 50 В (защита от обратного напряжения до 40 В).
VM - источник питания двигателя после MOSFET-транзистора защиты от обратного напряжения. Он может использоваться для подачи питания с защитой от обратного напряжения на другие компоненты системы. Этот вывод также можно использовать вместе с соседним выводом GND для подключения внешнего электролитического конденсатора в качестве фильтра, где дополнительная шунтирующая ёмкость может быть полезна.
GND - земля.
AOUT1 - “положительный” вывод обмотки A.
AOUT2 - “отрицательный” вывод обмотки A.
BOUT1 - “положительный” вывод обмотки B.
BOUT2 - “отрицательный” вывод обмотки B.
V5 (OUT) - стабилизированный выход 5 В. Обеспечивает доступ к напряжению внутреннего стабилизатора DRV8711. Стабилизатор может выдавать ток только до 10 мА, поэтому он в первую очередь полезен только для подключения входов платы к высокому уровню и питания подтягивающих резисторов к выходам платы с открытым стоком. Он отключен, когда устройство находится в спящем режиме.
IOREF - Все сигнальные выходы платы (кроме BEMF) являются выходами с открытым стоком, подтянутыми к IOREF, поэтому на этот контакт следует подавать логическое напряжение управляющей системы. Его можно подключить к соседнему выводу V5 (OUT) при использовании в системе с логическими уровнями 5 В.
STEP/AIN1 - контакт настройки микро шага. В PWM-режиме управляет AOUT1.
DIR/AIN2 - направление вращения. в PWM-режиме управляет AOUT2.
SDATO (MISO) - SPI выход данных (открытый сток).
SDATI (MOSI) - SPI вход данных.
SCLK - SPI тактовый вход.
SCS - SPI выбор устройства (chip select).
SLEEP - Спящий режим. Низкий уровень - спящий режим / высокий - включение драйвера.
RESET - сброс логики и регистров, отключает выходы.
FAULT - выход с открытым стоком, который переходит в состояние низкого уровня при возникновении ошибок. Этот вывод подтянут к IOREF.
BIN1 - в PWM-режиме управляет BOUT1.
BIN2 - в PWM-режиме управляет BOUT2.
STALL/BEMFV - выход с открытым стоком, подтянутый к выводу IOREF на плате. В режиме обнаружения заклинивания выход переходит в низкий уровень.
BEMF - Аналоговый выход, отображающий обратную ЭДС двигателя. Сигнал на этом выводе может быть дополнительно обработан микроконтроллером для реализации более совершенных алгоритмов управления.
Для более подробной информации смотрите документацию на драйвер.
Примечание: При высоких входных напряжениях (особенно выше 30 В) и при высоком токе на обмотку интерфейс SPI драйвера может подвергаться воздействию электрических помех, что может приводить к ошибкам передачи данных. Эту помеху можно уменьшить аккуратной разводкой проводов и экранированием, а риск непредсказуемого поведения снизить, соблюдая меры предосторожности при работе с SPI (например, считывать и проверять настройки после записи и избегать конфигурации драйвера при включённом двигателе).
Примечание: подключение или отключение шагового двигателя при включенном драйвере может привести к его поломке.
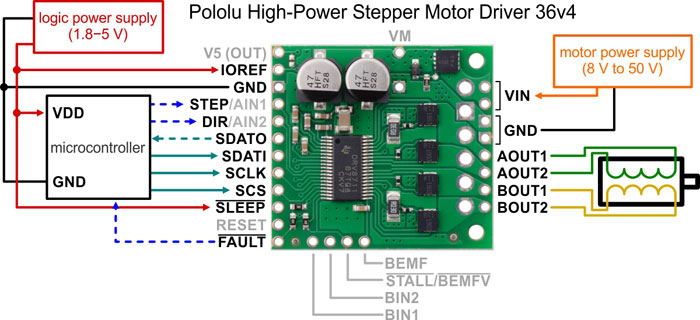
Стандартная схема подключения:
Примечание: драйвер позволяет управлять шаговым двигателем через STEP и DIR, но после каждого включения питания его необходимо сначала настроить через интерфейс SPI. Это означает, что управляющий микроконтроллер должен быть способен выступать в качестве ведущего устройства SPI (с периферийным устройством SPI или программным SPI) и должен быть подключен к выводам SDATI, SCLK и SCS. Хотя выводы SDATO и FAULT не являются обязательными для использования этого драйвера, рекомендуется использовать их для отслеживания ошибок.
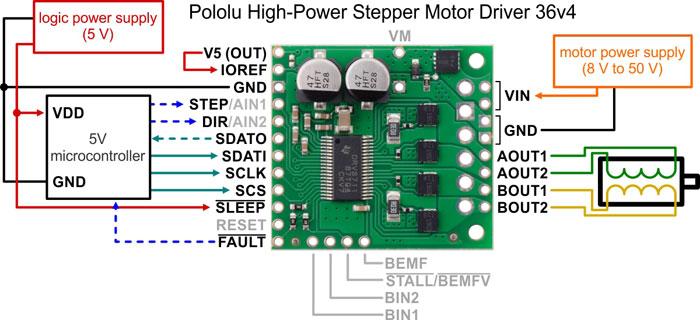
Стандартная схема подключения для систем с 5 В логикой:
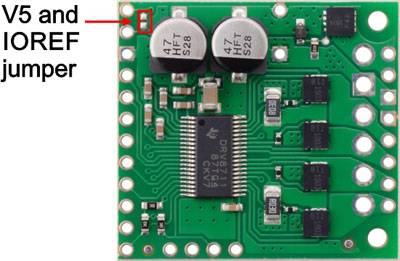
Примечание: Драйвер имеет внутренний стабилизатор напряжения 5 В, который можно использовать для подачи напряжения IOREF в случае использования платы в системах с напряжением 5 В. Для этого можно подключить контакт 5 В к IOREF, или для более компактного соединения можно перемкнуть перемычку для поверхностного монтажа, расположенную рядом с этими контактами.
Обратите внимание, что подача напряжения IOREF от V5 не позволяет получить доступ к регистрам устройства через SPI, когда устройство находится в спящем режиме, поскольку выход стабилизатора V5 отключен при низком уровне сигнала SLEEP.
Предупреждение: Драйвер двигателя не имеет эффективной системы отключения при перегреве (хотя микросхема DRV8711 имеет защиту от перегрева, первыми перегреваются внешние МОП-транзисторы). Перегрев может привести к необратимому повреждению драйвера. Настоятельно рекомендуется не увеличивать ток выше 4 А.
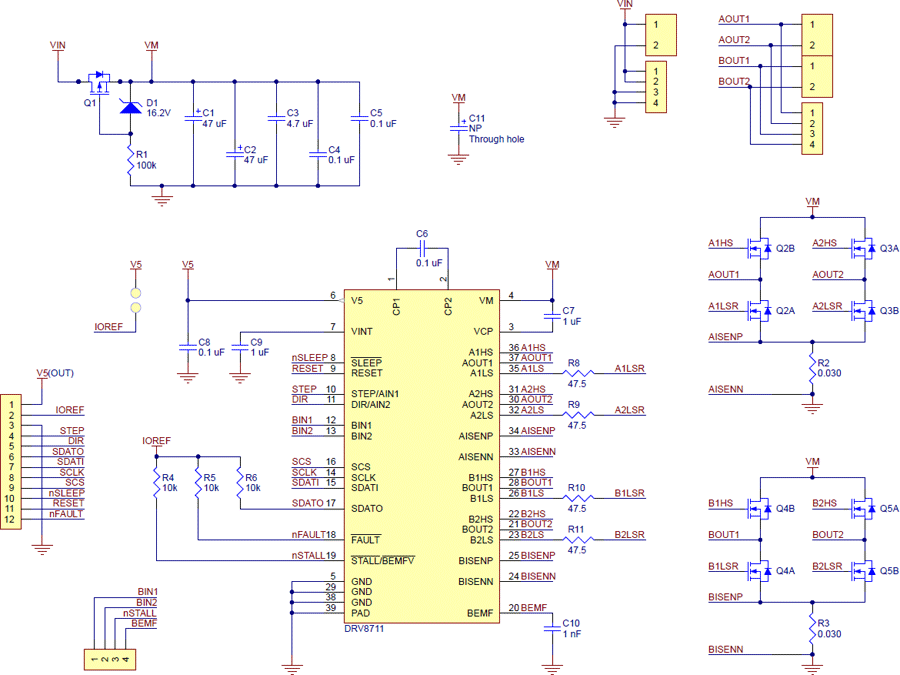
Принципиальная схема:
Отзывы покупателей про Мощный драйвер шагового двигателя Pololu High-Power Stepper Motor Driver 36v4
пока нет ни одного отзыва - станьте первым!
Написать отзыв:
Есть вопросы по "Мощный драйвер шагового двигателя Pololu High-Power Stepper Motor Driver 36v4" ?
Сообщение успешно отправлено. Мы ответим Вам в ближайшее время. Спасибо за Ваш запрос!
Дорогие друзья! Мы стараемся держать на сайте информацию про наличие товаров и цены на них в АКТУАЛЬНОМ состоянии. Корректировки происходят постоянно. Если вы находите цену на товар завышенной, напишите нам про это с указанием ссылки на товар. Мы рассмотрим письмо и или обоснуем цену, или подкорректируем ее. Ассортимент магазина очень большой и иногда бывают ошибки в ценообразовании, особенно при скачках курса доллара. Благодарим за понимание.