|
Каталог
|
Двохосьова система слідкування за сонцем2023-01-05 Все статьи →Мої вітання! В цій статті я познайомлю Вас з макетом двохосьової системи слідкування за сонцем для малогабаритної сонячної електростанції (СЕС). Мета розробки макету - дослідити на власному прикладі ефективність динамічної СЕС в порівнянні зі статичною СЕС, для подальшої роботи над системою безперебійного та автономного живлення на базі малогабаритних СЕС. В подальшому, розроблена система безперебійного та автономного живлення на базі малогабаритних СЕС буде інтегрована в систему моніторингу кліматичних параметрів з віддаленою агрегацією отриманої інформації. Реалізувати систему слідкування за сонцем можна двома основними методами, або безпосередньо стежити за рівнем освітленості, на сенсорній основі, або робити обчислення положення сонця і повертати конструкцію згідно розрахованим координатам. Одним з суттєвих недоліків першого методу є періодичне затемнення сонця хмарами, в такому випадку значення рівню освітленості буде не стабільним, і система буде відповідно нестабільно себе поводити, через це, було обрано другий метод слідкування за сонцем. Для повороту конструкції розраховується азимут та висота сонця над горизонтом за актуальним географічним положенням та часом спостереження. Для отримання актуальної дати та часу використовується модуль годинника реального часу на базі мікросхеми DS3231, та відповідна бібліотека до нього - «DS3231». Розрахунок положення сонця виконується за допомогою бібліотеки «SunPosition», також використовується додаткова бібліотека «UnixTime» для конвертації дати та часу у необхідний формат. Основні деталі конструкції взяті з набору для зборки п'яти-осьового роботизованого маніпулятору.
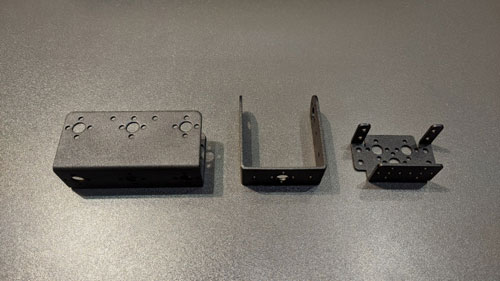
Ці деталі можна придбати і окремо, деталі рухомої частини, які було використано під час зборки макету приведені нижче.
Зображення 1 - Деталі рухомої частини, які було використано під час зборки макету Конструкція складається з пластикового корпусу, всередині якого знаходиться апаратна частина, корпус закріплено на одній з металевих деталей яка є основою конструкції:
Зображення 2 - Основа конструкції З протилежного боку на цю металеву деталь закріплено інші рухомі частини конструкції як показано на зображеннях нижче:
Зображення 3 - Рухома частина конструкції
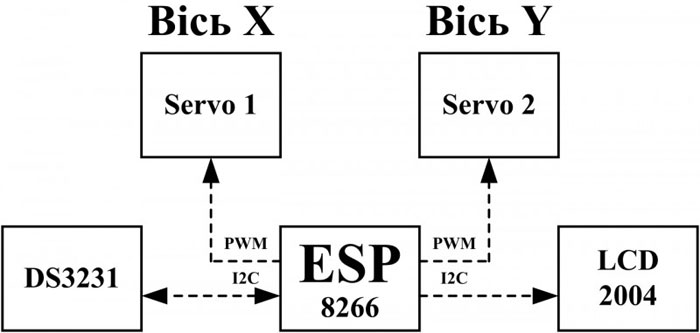
Зображення 4 - Рухома частина конструкції Для зручності роботи з макетом, було передбачено встановлення його на штатив. Для здійснення поворотів конструкції за відповідними осями використовується два сервоприводи MG995, з кутом повороту 270°. Для кращого результату роботи, та точнішого позиціонування, рекомендую використовувати більш якісні сервоприводи, з цифровою схемою керування, але, в такому випадку необхідно буде врахувати особливості керування такими сервоприводами, оскільки в даному макеті для керування сервоприводами використовується бібліотека «ServoSmooth», за допомогою якої реалізовано функцію плавного руху конструкції. Для обчислення рухів та безпосереднього керування сервоприводами використовується мікропроцесорна платформа на базі чипу ESP8266 - NodeMCU. Також, на етапі налагодження було встановлено 4-х строковий, 16-ти символьний рідкокристалічний дисплей з I2C інтерфейсом, для зручності відображення необхідної інформації щодо роботи системи. Загальна структурна схема макету приведена нижче:
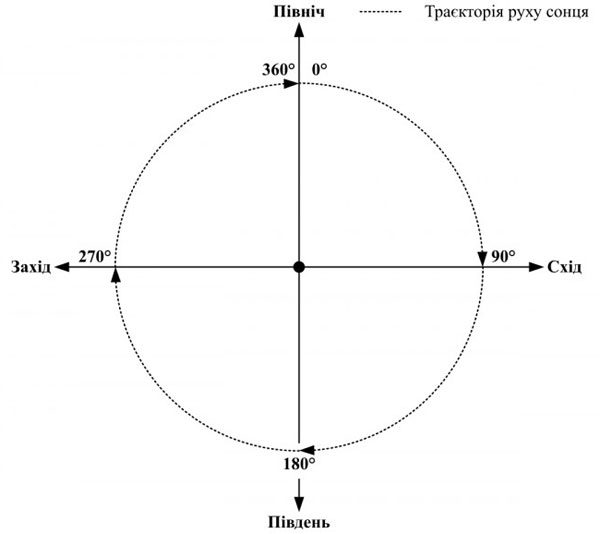
Зображення 5 - Структурна схема макету Для встановлення сервоприводів у відповідні положення згідно розрахованим координатам сонця, необхідно враховувати власне положення системи слідкування згідно географічного напрямку в якому вона знаходиться. Уявимо загальну систему координат та додамо схематичне зображення азимутального руху сонця:
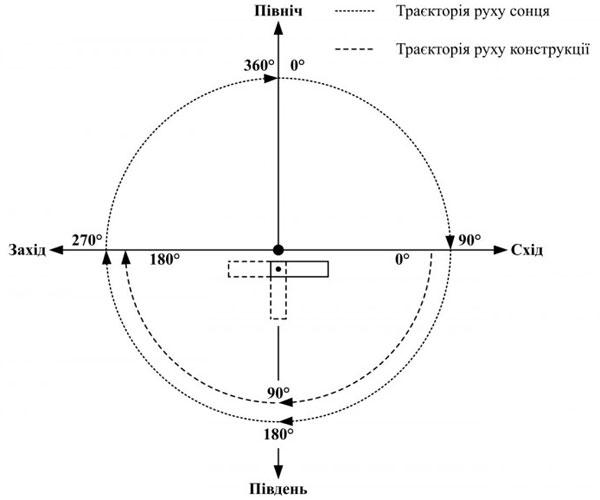
Зображення 6 - Схематичне зображення азимутального руху сонця відносно загальної системи координат згідно географічних точок горизонту Для зручності, при горизонтальному переміщенні і встановленні конструкції за відповідним значенням азимуту, до загальної системи координат додамо положення системи стеження та повну траєкторію її горизонтального руху. Поворот рухомої частини конструкції починається з 0° і закінчується 180° відносно власної траєкторії руху. За траєкторією азимутального руху сонця, поворот рухомої частини конструкції повинен починатися з 90° і закінчуватись 270°, що буде відповідати повному, денному циклу азимутального руху сонця, яке конструкція здатна повторити враховуючи її механічні обмеження. Схематичне зображення горизонтального руху конструкції та азимутального руху сонця відносно загальної системи координат приведено нижче:
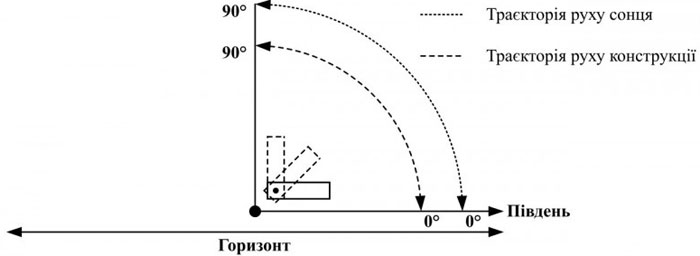
Зображення 7 - Схематичне зображення горизонтального руху конструкції та азимутального руху сонця відносно загальної системи координат Для правильної роботи системи слідкування, початкову точку горизонтального руху конструкції, яка відповідає 0° за власною траєкторією горизонтального руху, необхідно направити на східну точку горизонту. При вертикальному переміщенні і встановленні конструкції за відповідним значенням висоти сонця, необхідно встановити початкову точку руху сервоприводу так, щоб конструкція приймала горизонтальне положення і відповідала 0° за системою координат вертикального руху. Кінцева точка вертикального руху повинна дорівнювати куту 90° і бути перпендикулярна горизонту. Схематичне зображення вертикального руху конструкції та руху сонця відносно висоти над горизонтом приведено нижче:
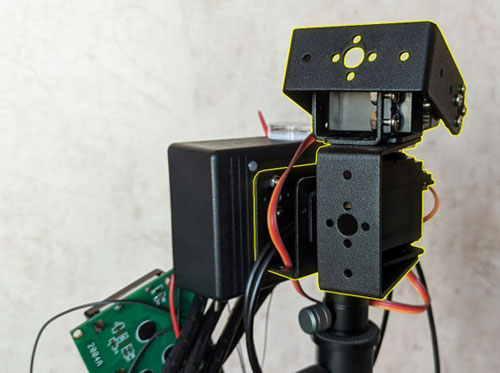
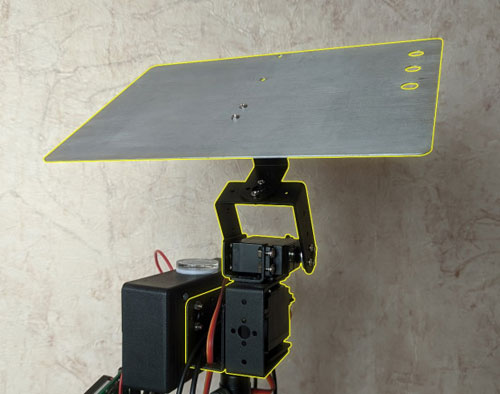
Зображення 8 - Схематичне зображення вертикального руху конструкції та руху сонця відносно висоти над горизонтом Також, під час написання програмного алгоритму керування сервоприводами, необхідно враховувати похибку кута їх початкового та кінцевого стану, і вказувати реальні значення кутів відносно максимальних і мінімальних точок руху. У мене максимальний кут сервоприводу в горизонтальному положенні становив 139°, а мінімальний 3°, тобто, 139° сервоприводу відповідало 0° рухомої частини конструкції, а 3° сервоприводу відповідало 180° рухомої частини конструкції. У вертикальних положеннях максимальний кут сервоприводу становив 168°, що відповідало 0° рухомої часини конструкції, а мінімальний кут сервоприводу становив 79°, що відповідало 90° рухомої часини конструкції. Зазначу, що під час ініціалізації сервоприводів я не вказував робочій кут сервоприводів які я використовував, він стояв за замовченням і дорівнював 180°, а робочій кут сервоприводів які я використовував становив 270°, через це в мене вийшла така різниця в робочих кутах. Але, якщо при ініціалізації вказати актуальний кут використовуваних сервоприводів, ситуація краще не стане, тільки якщо ви будете використовувати більш якісні сервоприводи з цифровою схемою керування. Також, в мене присутня інверсія поворотів конструкції відносно кутів, це супроводжується кріпленням самої конструкції, для правильного повороту рухомої частини конструкції сервоприводи необхідно кріпити в таких положеннях що їхні кути не співпадають з кутами руху сонця. Серед функції, які представлені в бібліотеці «SunPosition», було задіяно дві основні для визначення координат - azimuth() та altitude(), які повертають числове значення кутів положення сонця. Також, використовувались дві функції для обмеження мінімального та максимального азимутального кута повороту конструкції, згідно тривалості світлового дня, це azimuthMin() та azimuthMax(), які повертають числове значення кута сходу та заходу сонця. Також, було реалізовано функцію, яка після заходу сонця повертає конструкцію в положення паралельно горизонту, для зменшення вітрового навантаження. Для перевірки правильності розрахунку координат сонця, було використано сервіс «suncalc.org». Загальний вигляд макету двохосьової системи слідкування за сонцем приведено нижче, в подальшому, на макет буде встановлено сонячну панель, та додано блок моніторингу електричних параметрів, щодо генерації, накопичення та споживання електричної енергії.
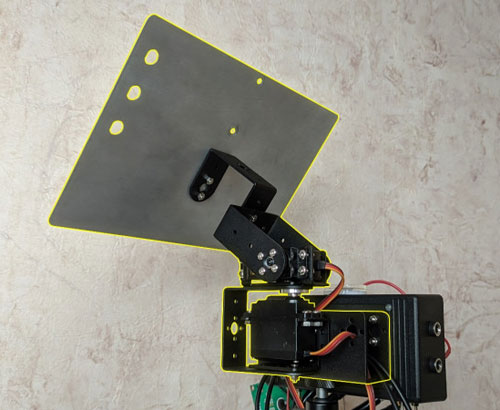
Зображення 9 - Загальний вигляд макету двохосьової системи слідкування за сонцем
Зображення 10 - Загальний вигляд макету двохосьової системи слідкування за сонцем Завантаження:
Общая оценка:
Оценка
"Двохосьова система слідкування за сонцем"
сделана на основе 5 оценок 5 клиентских отзывов. Благодарим Вас за обращение! Ваш отзыв появится после модерации администратором.
Евген
29.12.2024 21:31:38

Все написано доступно,не вистачає схеми підключення до ESP та можливості підключення GPS -модуля
Автор
14.06.2023 13:30:37
Результати досліджень будуть підготовлені у вигляді другої статті на цю тему...
Вадим
14.06.2023 09:35:12

"Мета розробки макету - дослідити на власному прикладі ефективність динамічної СЕС в порівнянні зі статичною СЕС"Исследование к чему пришло? Динамическая система на сколько эффективнее статической?
Тайлер Дерден
02.03.2023 19:52:19
Прікольно, прям капєц прікольно
Сергiй
28.01.2023 20:43:08
Цікава стаття! Особливо коли відключення світла вельми часті.
|
График работы магазина:
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной
Пн-Пт: 8.00 - 19.00
Сб: 10.00 - 17.00
Вс: выходной